
基于DSP的直流电机的PWM控制系统(新)
无需注册登录,支付后按照提示操作即可获取该资料.
摘 要
本文详细介绍了基于DSP的直流电机的PWM控制系统。该系统选用TI公司的高性能、低价位的16 位定点 TMS320LF2407A 芯片作为主要部分,辅以键盘、电机驱动系统、光电隔离驱动系统、霍尔电流传感器、增量式光电编码器对直流电动机的速度和方向进行控制。
该系统先由键盘改变速度或者方向参数给予 DSP,DSP经过速度PI调节、电流PI调节输出PWM控制信号,经PWM引脚输出的控制信号通过H型单极可逆驱动电路对直流电动机进行控制,而霍尔电流传感器检测直流电动机的电流变化、增量式光电编码器检测直流电动机的转动方向和速度变化,反馈回DSP,形成闭环控制。速度PI调节、电流PI调节、PWM控制都是通过程序来实现。
本系统采用了TI公司的电机控制专用芯片TMS320LF2407A主控,由于它具有片上资源丰富、高运算速度和强控制能力等特点,所以本系统和其他系统相比具有更高的性能和更低的成本。
关键词:DSP ;TMS320LF2407A;直流电动机;PWM控制(脉冲宽度调制)
Based on DSP direct current machine PWM control
Abstract
This article introduced in detail based on the DSP direct current motor PWM control system. This system selects TI Corporation the high performance, the low end 16 fixed-point TMS320LF2407A chip took the main part, auxiliary by the keyboard, the motor-driven system, the photoelectricity isolation actuation system, the Hall electric current sensor, the increase type photoelectricity encoder direct discharge motive speed and the direction carries on the control.
This system first changes the speed or the direction variable by the keyboard gives DSP, DSP after the speed PI adjustment, the electric current PI adjustment outputs the PWM control signal, actuates the electric circuit direct discharge motive after the PWM pin output control signal through the H single pole to carry on the control reversiblily,
But the Hall electric current sensor examination direct current motor electric current change, the increase type photoelectricity encoder examination direct current motor rotation direction and the speed change, feed back DSP, forms the closed-loop control.The speed PI adjustment, the electric current PI adjustment, the PWM control all is realizes through the procedure.
This system has used TI Corporation's electrical machinery control special-purpose chip TMS320LF2407A master control, because it has on the piece the resources rich, high characteristics and so on operating speed and strong control, therefore this system and other systems compare have a higher performance and a lower cost.
Key Words:DSP ;TMS320LF2407A;Direct current motor;PWM control (pulse width modulation)
直流电动机是最早出现的电动机,也是最早能实现调速的电动机。长期以来,直流电动机一直占据着速度控制和位置控制的统治地位。由于它具有良好的线性调速特性、简单的控制性能、高质高速平滑运转的特性,尽管近年来不断受到其他电动机(如交流变频电动机、步进电动机等)的挑战,但到目前为止,就其性能来说仍然无其它电动机相比。
近年来,直流电动机的结构和控制方式都发生了很大的变化。随着计算机进入控制领域,以及新型的电力电子功率元器件的不断出现,使采用全控制的开关功率元件进行脉宽调制(pulse width modulation,简称PWM)控制方式已成为绝对主流。这种控制方式已作为直流电动机数字控制的基础。
在直流调速控制中,可以采用各种控制器,DSP是其中一种选择。由于DSP具有高速运算性能,因此可以实现诸如模糊控制等复杂的控制算法。另外它可以自己产生有死区的PWM输出,所以可以使外围硬件最少。
1 直流电机DSP控制的相关知识
1.1 直流电机
1.1.1 直流电机的定义及基本结构
输出或输入为直流电能的旋转电机,称为直流电机。主要是定子和转子两部分组成。定子作用:产生主磁场和在机械上支撑电机。定子组成:主磁极、换向极、机座、端盖和轴承等。
1.1.2 直流电机的基本原理
直流电机作为发电机运行时,电枢由原动机驱动而在磁场中旋转,在电枢线圈的两根有效边 中便感应出电动势e。显然,每一有效边中的电动势是交变的,即在N极下是一个方向,当它转到S极下时是另一个方向。电刷和换向器的作用在于将发电机电枢绕组内的交流电动势变换成电刷之间的极性不变的电动势。当电刷之间接有负载时, 在电动势的作用下就在电路中产生一定方向的电流。负载电流在旋转绕组上产生负载转矩,方向与驱动转矩相反。
电流方向:
N极下的有效边中的电流总是一个方向,而S极下的有效边中的电 流总是另一个方向,这样才能使两个边上受到的电磁力的方向一致,电枢因而转动。
当电枢在磁场中转动时,线圈中也要产生感应电动势e,这个电动势的方向(由右手定则确定)与电流或外加电压的方向总是相反,所以称为反电势,它与发电机中电动势的作用是不同的。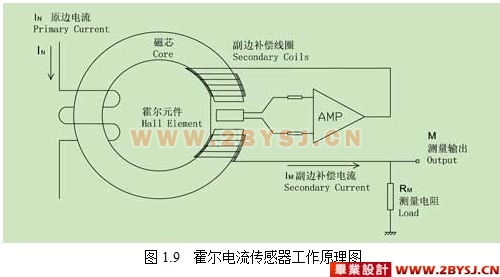
目 录 15000字
摘 要 I
Abstract II
引 言 1
1 直流电机DSP控制的相关知识 2
1.1 直流电机 2
1.1.1 直流电机的定义及基本结构 2
1.1.2 直流电机的基本原理 2
1.2 数字信号处理器(DSP芯片) 3
1.2.1 DSP 芯片的特点 3
1.2.2 DSP芯片的发展 4
1.2.3 TMS320LF2407A芯片 4
1.3 脉冲宽度调制(PWM控制)技术 8
1.3.1 PWM介绍 8
1.3.2 PWM调速控制原理 10
1.4 PID算法 11
1.4.1 PID简介 11
1.4.2 PID应用 12
1.5 H型单极可逆PWM驱动系统 13
1.6 光电隔离 14
1.7 增量式光电编码器 15
1.8 霍尔电流传感器 15
2 硬件电路设计及实现 17
2.1 直流电机调速双闭环控制框图 17
2.2 直流电机DSP控制和驱动电路 17
2.3 直流电机DSP控制电路原理图 18
2.3.1 TMS320LF2407A 芯片封装图 18
2.3.2 驱动电路、霍尔电流传感器、直流电动机电路原理图 19
2.3.3 光电隔离电路原理图 19
2.3.4 增量式光电编码器原理图 20
2.3.5 键盘控制电路原理图 20
2.3.6 JTAG 电路原理图 21
2.3.7 复位电路原理图 21
2.3.8 时钟/晶振电路 原理图 22
2.3.9 锁相环滤波电路原理图 22
2.3.10 电压滤波原理图 22
3 软件程序设计及实现 23
(毕业设计:www.2bysj.cn)
3.1 CCS软件介绍 23
3.1.1 CCS简介 23
3.1.2 CCS集成开发环境应用 23
3.2 直流电机DSP控制程序 24
3.2.1 初始化程序 24
3.2.2 A/D中断处理子程序 26
3.2.3 电流PI调节程序 26
3.2.4 读编码器脉冲数,计算转角增量和转速程序 27
3.2.5 速度PI调节 28
结 论 30
参 考 文 献 31
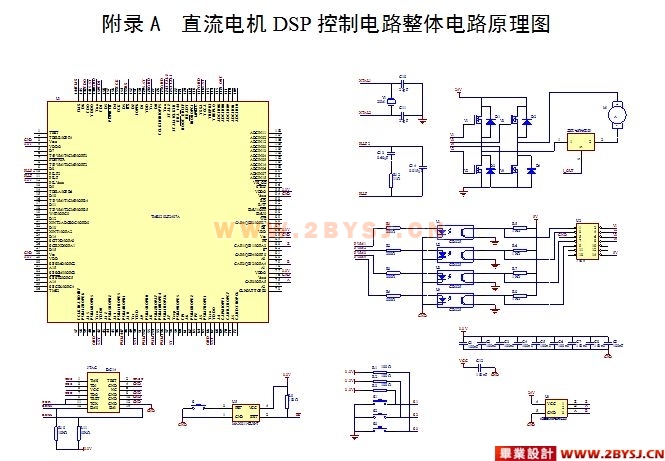
附录A 直流电机DSP控制电路整体电路原理图 32
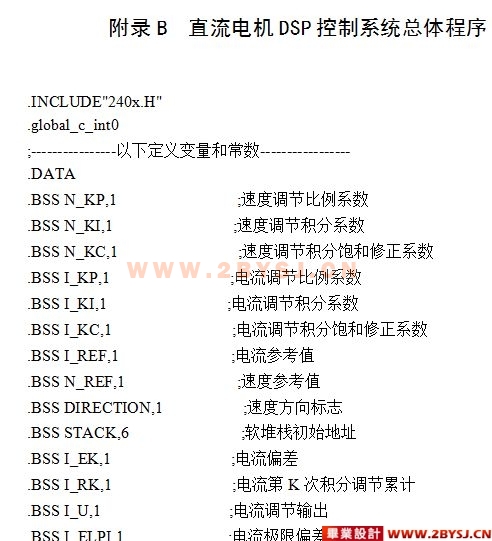
附录B 直流电机DSP控制系统总体程序 33
致 谢 42