
基础道路自识别的智能汽车控制系统设计
无需注册登录,支付后按照提示操作即可获取该资料.
基础道路自识别的智能汽车控制系统设计(论文11000字)
摘 要
智能汽车凭借着其灵活、先进、高级、灵敏便利等特色受到了很多人的喜欢。智能汽车可以依据驾驶者所设置的参数进行判断和运算,判别驾驶者操作智能汽车的指令,而且做出相对应的反映。因而智能汽车除了可以辨识驾驶人员给它的相关指令外,还要可以对将要行驶的道路进行判别,并能够根据驾驶者的选择来行驶。
所以本课题来设计解决基于道路自识别的智能汽车的控制系统,采用单片机控制系统, 用来在其内部存贮实行逻辑运算、顺序控制、定时、计数和算术运算等操作的指令, 并通过数字和模拟的输入和输出, 来控制整个系统,并实现完整的智能汽车的行驶功能。
关键词:智能汽车;运算;控制;行驶
主要内容
本次设计的题目是基础道路自识别的智能汽车控制系统的设计,主要内容为:
1)分析了解基础道路自识别智能汽车控制系统的工作原理
2)完成对应的硬件和软件设计
3)完成基础道路自识别智能汽车控制系统的单片控制
该设计主要包括硬件设计和软件设计。
2.1智能小车结构设计
2.1.1 车模结构特点
本项目采用后轮驱动,前轮转向。使用前置单排非均匀排布红外传感器探测路面信号。电源模块和MCU的扩展电路板置于小车顶部。整个小车重心在中部偏后,有较好的稳定性。经过改装后的车模尺寸如下
2.1.2 电路板的固定及连接
一共用到三块外接电路板,所有电路板都制作成印制板。分别为传感器主板,传感器尾板,车身主板(包括MCU,调试电路,电源电路,测速传感器)
目 录
摘 要 I
Abstract II
第一章 绪论 1
1.1课题背景和意义 1
1.2智能汽车的发展现状 3
1.3主要内容 4
第二章 智能小车硬件设计 5
2.1智能小车结构设计 7
2.1.1车模结构特点 9
2.1.3电路板的固定及连接 10
2.2电路设计 11
2.2.1传感器电路设计 12
2.2.2测速传感器的设计 13
2.2.3电源管理模块 15
2.2.4驱动模块 17
2.2.5调试模块 19
第三章 智能小车软件系统设计 22
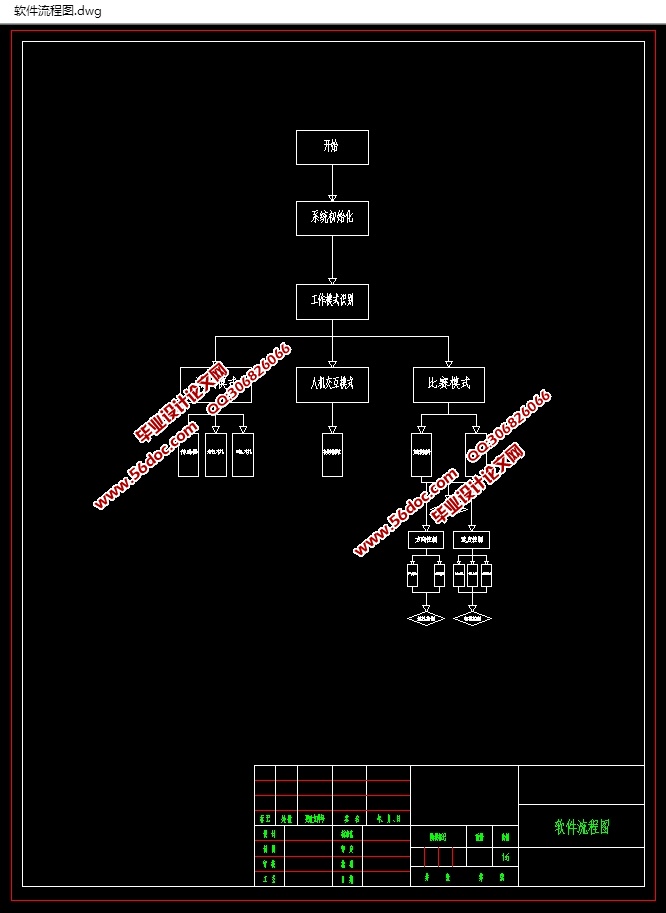
3.1系统流程图的确定 24
3.2 PID控制算法 26
3.3舵机方向控制算法 28
3.4速度控制算法 30
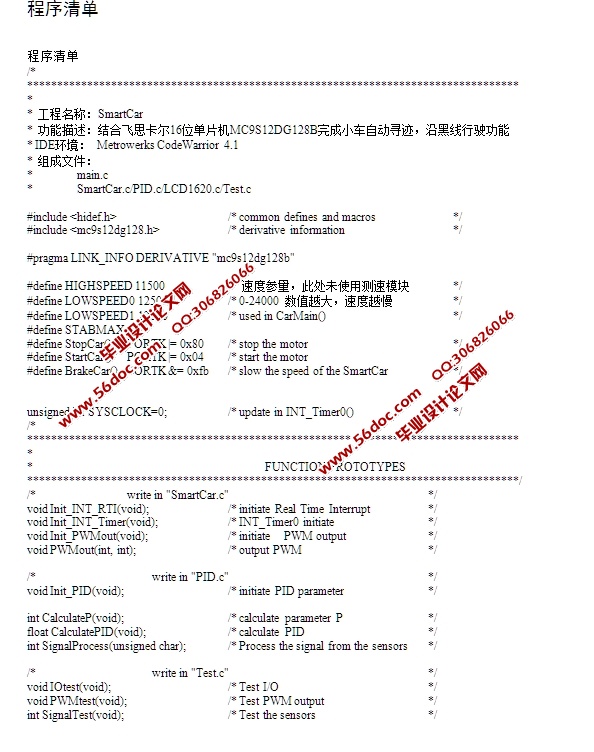
第四章 附录 31
结 论 32
致 谢 33
参考文献 34