
超声波汽车倒车雷达系统设计(程序+原理图+PCB+CAD)(精品)☆
无需注册登录,支付后按照提示操作即可获取该资料.
摘 要
本文首先分析了现在汽车倒车雷达的测试原理指出其存在的不足之处(如应用范围的有限,测量距离短),提出了改进的方法。
本测距系统根据超声波在大气中传输的方向特别集中和遇到障碍物之后容易反射的特点,计算出发射和接收的时间差,再根据超声波的传输速度和大气温度的关系,就可以精确计算出超声波的传输速度。此测试系统先根据当前的温度下超声波传输的速度,根据测出的时间差求出汽车和障碍物之间的距离;在测量相对运动速度时,利用多普勒效应,只要测定超声波反射回来的频率,在自身速度已知的情况下,就可以很容易计算出障碍物相对汽车的运动的速度;并且在汽车自身的速度未知的情况下,可以给出汽车与障碍物的相对运动速度的范围。
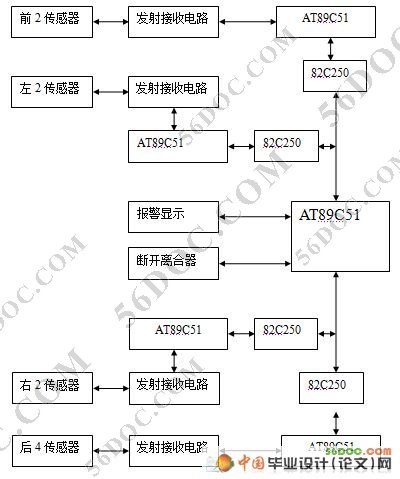
此系统有4大功能模块组成,即:主控模块、测距模块、测温模块和测速模块。测温单元和测距测速通过CAN总线和主控模块进行通讯,主控模块根据测得数据和计算公式得出系统所需要的结果,判断是否存在危险,并显示与报警。
关键词:倒车雷达;超声波;主控模块
Abstract
In this paper I have analyses the general situation of the existing Parking sensors in motorcar, pointed its defects and the improvement measurement.
The distance measurement system uses the specialty that transmits direction focus on one direction in air and easily reflects while it meets with the obstacle. When calculate the time lag between the operation of sending and receiving. According to the relation between convey velocity of the ultrasonic and the air temperature, elicit the present convey velocity of the ultrasonic in current air temperature, then calculator the distance between the system and the obstacle, while measure the relative velocity, according to the knowledge of Doppler effect on physics, only if measure the quotient of the reflect ultrasonic on the basis of the present velocity, then we can calculate the speed of the obstacle. If we don’t know the system velocity, we also can estimate the relative speed between them.
The measure system consists of four function module; they are host system, temperature measurement cell, distance measurement cell, and the velocity measurement cell. We use the CAN bus transmits between distance measurement cell or velocity measurement cell and the host system. And the host system gathers data from these two cells. After it , the host system calculate and judge whether there is a danger in the system, and give out appropriate alarm signal according to the danger degree.
Keywords: radar; ultrasonic; host system
功能总结
从以上资料我们可以看出,现在的汽车雷达有以下不足之处:
1) 应用范围很小,只能在汽车倒车是使用,在汽车进行过程中无法探测到汽车前后左右的情况。而汽车事故在很大程度上发生在汽车行进过程中,如雾天时可视距离十分短的情况下,容易发生交通事故。在拥挤的马路上,经常发生的汽车追尾事件中,当后方的车辆十分靠近的时候,汽报警设备可以给出报警信息的话,相信很大类似的交通事故可以避免。
2) 探测范围有限。市场上现有的汽车倒车雷达探测距离有限,大约两三米左右。
3) 有的汽车倒车雷达存在死区,系统往往失灵。
4) 很多汽车倒车雷达过于灵敏,多次出现误报的现象。
对汽车倒车雷达的改进要求
从以上的材料我们可以看出,对现在的汽车倒车雷达的改进,具有很强的现实意义。以下的改进要求:
1) 扩展其应用的范围。改进和设计的倒车雷达不仅仅是应用在汽车倒车的时候,汽车在行进的过程中同时也可使用。比如在恶劣的天气中,在能见度低的情况在,汽车雷达可以有效地探测到汽车前后的障碍物的分布情况,并判断是否存在危险。如果存在危险,及时报警,提醒驾驶员。
2) 探测距离应该适当的扩大。当然2-3米的探测距离可能在缓慢倒车的时候,已经够用了,但是在汽车高速行驶的过程中,如果只能探测到有限距离的障碍物的分布情况,如果存在危险的可能,驾驶员是来不及做出反映的。所以要尽可能地扩大探测的有效范围。
3) 要提高系统的稳定性和可靠性。在系统的设计上有避免探测死区的出现,在电路和程序上做一些处理提高系统的稳定性。


目 录 30000字
第1章 引言 1
第1.1节 倒车雷达研究的背景及意义 1
第1.2节 倒车雷达发展现状 6
第1.3节 倒车雷达功能总结和改进要求 8
第2章 系统设计原理 8
第2.1节 几种测距技术 8
第2.2节 确定方案 9
第3章 超声波测距原理 14
第3.1节 超声波 14
第3.2节 超声波测距原理 16
第3.3节 超声波测速原理 17
第4章 CAN总线技术 21
第4.1节 CAN总线的特点 21
第4.2节 CAN在汽车中的应用 23
第4.3节 SJ1000独立CAN控制器 24
第4.4节 CAN总线系统智能节点硬件电路设计 25
第5章 超声波倒车雷达芯片选择 27
第5.1节 单片机控制芯片 27
第5.2节 超声波接收芯片 30
第5.3节 语音报警电路芯片 31
第5.4节 测温芯片DS18B20 34
第5.5节 超声波传感器 42
第6章 硬件设计 45
第6.1节 超声波发射电路 45
第6.2节 超声波接收电路 46
第6.2节 语音报警电路 47
第6.2节 测温电路 49
第6.2节 显示电路 50
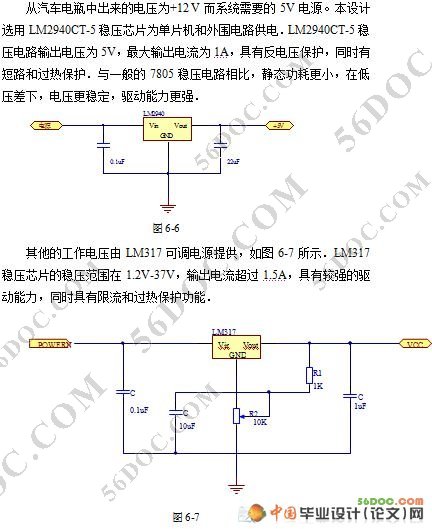
第6.2节 电源电路 51
第7章 软件设计 53
第7.1节 后倒车雷达软件设计 53
第7.2节 主控器的软件设计 56
总结 56
参考文献 57
附录1 58
中英文翻译 70
致谢 81