
�綯����С�������
����ע���¼,֧��������ʾ�������ɻ�ȡ������.
ժ Ҫ
80C51��Ƭ����һ���λ��Ƭ�������������ԺͶ�����ܵ��˹��ʹ���ߵĺ�����������ܵ��������80C51��Ƭ����ʵ�ֳ�����ҵ��ѧ����ҵ�����������ǽ�Ͽ�����Ŀ��ȷ�����������⡣��ϵͳ�������Ŀ��Ҫ��ΪĿ�ģ�����80C51��Ƭ��Ϊ���ƺ��ģ����ó���������������·�ϵ��ϰ������Ƶ綯С�������Զ����ϣ���������ʻ���Լ��Զ�ͣ�����������Զ���¼ʱ�䡢��̺��ٶȣ��Զ�Ѱ����Ѱ��ܡ�����ϵͳ�ĵ�·�ṹ���ɿ����ܸߡ�ʵ����Խ������Ҫ�������ؽ����˸�ϵͳ��Ӳ����Ʒ��������Խ��������
���õļ�����Ҫ�У�
��1�� ͨ�����������С�����ٶȣ�
��2�� ����������ЧӦ�ã�
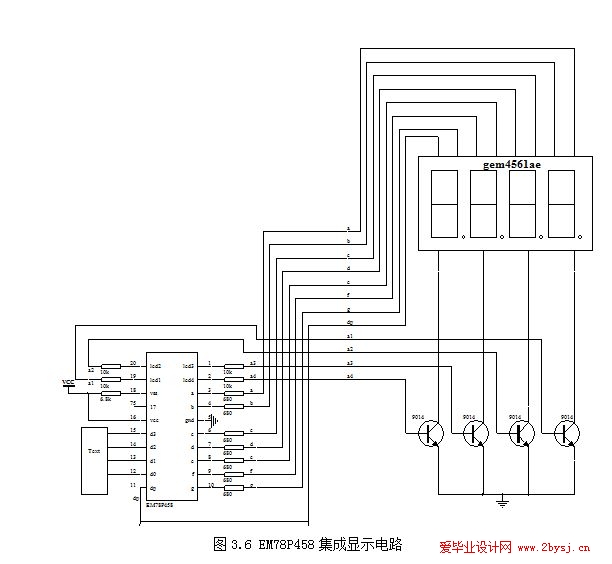
��3�� ������ʾоƬ�IJ���.
�ؼ��� 80C51��Ƭ�������������PWM���١��綯С��
Design and create an intelligence electricity motive small car
Abstract
80C51 is a 8 bit single chip computer. Its easily using and multi-function suffer large users. This article introduces the CCUT graduation design with the 80C51 single chip computer. This design combines with scientific research object. This system regards the request of the topic, adopting 80C51 for controlling core, super sonic sensor for test the hinder. It can run in a high and a low speed or stop automatically. It also can record the time, distance and the speed or searching light and mark automatically the electric circuit construction of whole system is simple, the function is dependable. Experiment test result satisfy the request, this text emphasizes introduced the hardware system designs and the result analyze.
The adoption of technique as:
(1) Reduce the speed by program the engine��
(2) Efficient application of the sensor;
(3) The adoption of the new display chip.
Keywords 80C51 single chip computer, light electricity detector, PWM speed adjusting, Electricity motive small car
Ŀ ¼
��һ�� ǰ �� 1
�ڶ��� �����������֤ 3
һ ֱ������ϵͳ 3
�� ���ϵͳ 4
�� ��ʾ��· 9
�� ϵͳԭ��ͼ 9
������ Ӳ����� 10
һ 80C51��Ƭ��Ӳ���ṹ 10
�� ��СӦ��ϵͳ��� 11
�� ǰ��ͨ����� 12
�� ����ͨ����� 15
�� ��ʾ��·��� 17
������ ������� 20
һ ��������� 20
�� ��ʾ�ӳ������ 24
�� �����ӳ������ 25
�� ���������ż��� 26
�� �����Ź������� 28
�� �ɱ�������� 29
������ �������ݡ����Խ������������ 30
�� л 31
�� �� �� �� 32
��¼A �����嵥 33
��¼B Ӳ��ԭ��ͼ 41
��һ�� ǰ ��
����������ҵ��Ѹ�ٷ�չ�������������о�Ҳ��Խ��Խ���˹�ע��ȫ�����Ӵ�����ʡ��������������ÿ�ζ�������С���ⷽ�����Ŀ��ȫ������УҲ�������Ӹ���Ŀ���о����ɼ����о�����ܴ���ƾ����������ı���������ģ�ָ����ʦ�Ѿ��г�ֵ���������Ŀ�ǽ�Ͽ�����Ŀ��ȷ�����������⡣��Ƶ����ܵ綯С��Ӧ���ܹ�ʵʱ��ʾʱ�䡢�ٶȡ���̣������Զ�Ѱ����Ѱ�⡢���Ϲ��ܣ��ɳ̿���ʻ�ٶȡ�ȷ��λͣ����
������Ŀ��Ҫ��ȷ�����·�������������ߵ綯���Ļ����ϣ���װ��硢�����ߡ�������������������̽������ʵ�ֶԵ綯�����ٶȡ�λ�á�����״����ʵʱ�����������������ݴ�������Ƭ�����д�����Ȼ������Ƭ�����������ĸ�������ʵ�ֶԵ綯�������ܿ��ơ�
���ַ�����ʵ�ֶԵ綯�����˶�״̬����ʵʱ���ƣ��������ɿ������ȸߣ��������ϵͳ�ĸ���Ҫ����Ʋ���MCS-51ϵ���е�80C51��Ƭ������80C51Ϊ���ƺ��ģ����ó���������������·�ϵ��ϰ������Ƶ綯С�������Զ����ϣ���������ʻ���Լ��Զ�ͣ�����������Զ���¼ʱ�䡢��̺��ٶȣ��Զ�Ѱ����Ѱ��ܡ�80C51��һ���λ��Ƭ�������������ԺͶ�����ܵ��˹��ʹ���ߵĺ��������ǵ�������Ƭ���Ĵ�����
��������Ƭ��������Intel��˾��չMCS-51ϵ�е���һ����Ʒ����8��C152�p80C51FA/FB�p80C51GA/GB�p8��C451�p8��C452,��������Philips�pSiemens�pADM�pFujutsu�pOKI�pHarria-Metra�pATMEL�ȹ�˾��80C51Ϊ�����Ƴ��Ĵ���������ɫ�p��80C51���ݵĵ�Ƭ������һ���ĵ�Ƭ��������Ҫ�ļ����ص������ⲿ�ӿڵ�·��չ����ʵ��Microcomputer���ƵĿ��ƹ���Ϊ���Σ���һЩ�ⲿ�ӿڹ��ܵ�Ԫ��A/D�pPWM�pPCA(�ɱ�̼���������)�pWDT(���Ӷ�ʱ��)�p����I/O�کp�������IJ���/�Ƚ����ȡ���һ����Ƭ���У������߷�������Ҫ�Ľ�չ��Ϊ��Ƭ��������оƬ��Ĵ������ߣ�Ϊ��Ƭ��Ӧ��ϵͳ����ṩ�˸������ķ�ʽ��Philips��˾��Ϊ��һ����Ƭ��80C51ϵ��8��C592��Ƭ�������˾��н�ǿ���ܵ��豸������ϵͳ����----CAN(Controller Area Network BUS).
��һ����Ƭ��Ϊ�ⲿ�ṩ���൱���Ƶ����߽ṹ��Ϊϵͳ����չ�����ô��������õĻ�����
����ƾͲ����˱Ƚ��Ƚ���80C51Ϊ���ƺ��ģ�80C51����CHOMS���գ����ĺܵ͡�����ƾ���ʵ�����壬����Ӧ���ڿ��š������ˡ�ҽ����е������档������
������������о�������кܺõķ�չǰ�����ڿ��ŷ���ҲӦ�õ��˳��������������м�⡣���Ա������ʵ�����ϣ���ʵ�����ǿ��
�ڶ��� �����������֤
������Ŀ��Ҫ��ȷ�����·�������������ߵ綯���Ļ����ϣ���װ���������ʵ�ֶԵ綯�����ٶȡ�λ�á�����״����ʵʱ�����������������ݴ�������Ƭ�����д�����Ȼ������Ƭ�����������ĸ�������ʵ�ֶԵ綯�������ܿ��ơ�
���ַ�����ʵ�ֶԵ綯�����˶�״̬����ʵʱ���ƣ��������ɿ������ȸߣ��������ϵͳ�ĸ���Ҫ��
һ ֱ������ϵͳ
����һ�����������ϵͳ��
����������ֹ�ɿ������������V-Mϵͳ��
����������������ϵͳ��
��ת����ϵͳ�ɽ���������϶�ֱ���綯��ʵ�ֱ������ɷ��������Ҫ���ٵ�ֱ���綯�����磬���ڷ���������ŵ������ɸı��������ѹ���Ӷ����ڵ綯����ת�١��ı����ŵ����ķ����������ѹ�ļ��Ժ͵綯����ת�����Ÿı䣬����G-Mϵͳ�Ŀ��������Ǻ�����ʵ�ֵġ���ϵͳ��Ҫ��ת�������飬���ٰ�����̨����ٵ綯�������൱����ת�������Ҫһ̨���ŷ�������豸�ࡢ������øߡ�Ч�ʵ͡�ά���������ȱ�㡣�Ҽ��������˸��ò��á�
V-Mϵͳ�ǵ���ֱ������ϵͳ����Ҫ��ʽ���������ǵ��ࡢ���������������벨��ȫ������ء�ȫ�ص����ͣ���ʵ��ƽ�����١�V-Mϵͳ��ȱ���Ǿ�բ�ܵĵ����ԣ�����������������ϵͳ�Ŀ�������������ѡ�������һ��ȱ������������Ҫ��ߣ�ά�������鷳�����ϵͳ���ڵ�������ʱ��ϵͳ�Ĺ��������ܵͣ��������ϴ��г������Σ���������õ��豸��
���þ�բ�ܵ�ֱ��ն��������ԭ����������·��ͬ���ǣ������ᄃբ�ܲ�����λ���ƣ����ǹ����ڿ���״̬������բ�ܱ�������ͨʱ����Դ��ѹ�ӵ��綯���ϣ�����բ�ܹض�ʱ��ֱ����Դ��綯���Ͽ����綯�������������������˵�ѹ�ӽ����㡣������ȵ��ƣ�Pulse Width Modulation�������PWM���������ڲ��䣬ֻ�ı侧բ�ܵĵ�ͨʱ�䣬��ͨ���ı��������������ֱ�����١�
��V-Mϵͳ��ȣ�PWM����ϵͳ�������ŵ㣺
��1������PWM����ϵͳ�Ŀ���Ƶ�ʽϸߣ����������е��˲����þͿ��Ի��������С��ֱ�������������������������ϵͳ�ĵ�������ƽ�ȣ����ٷ�Χ�Ͽ����ɴ�1��10000���ҡ����ڵ������α�V-Mϵͳ�ã�����ͬ��ƽ�������£��綯������ĺͷ��ȶ��Ƚ�С��
��2��ͬ�����ڿ���Ƶ�ʸߣ����������Ӧ�ĵ������ϣ�ϵͳ���Ի�úܿ���Ƶ������˿�����Ӧ���ܺã���̬��������ǿ��
��3�����ڵ�����������ֻ�����ڿ���״̬������·��Ľ�С��װ��Ч�ʽϸߡ�
���������ۺϱȽϣ��Լ���������ܿص����������ֱ��������ٵķ�չ������Ʋ�����H�͵����Ϳ���PWM�任�����е��١�
��������ϵͳ������·������������ʽ�任�������PWM�任����
��������Ҳ��ͨ����Ƭ�����Ƽ̵����ıպ���ʵ�֣����������������ޡ�Ϊ˳��ʵ�ֵ綯С������ǰ���뵹��������Ʋ����˿���PWM�任��������PWM�任������·�Ľṹʽ��H�͡�T�͵����͡�����������в����˳��õ�˫��ʽH�ͱ任����������4��������������ܺ�4��������������ɵ���ʽ��·��
�� ���ϵͳ
���ϵͳ��Ҫʵ�ֹ���⣬�����ø��ִ������Ե綯���ı��ϡ�λ�á��г�״̬���в�����
1���г���ʼ���յ㼰����⣺
��ϵͳ���÷���ʽ�����߹�紫�������ڼ��·�����ʼ���յ㣨2cm���ĺ��ߣ�����߳��������غ��߷���һ�ף�����Ӧ��ʼ�ļ�����ʼ���յ��ͣ������Ҫ�����ó���������������ϰ������߸��٣����ù��������ܽ��յ��ݷ����Ĺ��ߣ������ܵ���������ʱ����c-e�����ֵ�½�������·����ߵ�ƽ����LM393��ѹ�Ƚ�����74LS14ʩ���ش��������κ�����Ƭ�����ơ�
��ϵͳ�����������������ܣ��ֱ�����ڵ綯����ͷ���������������������Ƶ綯�������߷����������ܵ�����ʱ����Ƭ������ת��������ת�����Ҳ�����ܵ�����ʱ����Ƭ������ת��������ת��������������ܶ��ܵ�����ʱ����Ƭ������ֱ�С���ͼ2.1 �綯���ķ������·(a)��
�г��������·����ͼ2.2 �綯���ķ������·(b)�����÷������ԭ��������һ�Ժ����߷��䡢���մ��������õ�·����һ�����ⷢ������ܡ�һ��������������ܼ����������衣���ⷢ������ܷ���һ��ǿ�ȵĺ������������壬��������������ڽ��յ���������ĺ����ߺ�ͨ������һ����ƽ�����źš�
�������紫�����̶��ڵ���ǰ�أ��������档������ʻʱ������ܷ�������������棬���߾���ֽ������չܽ��գ�����ߵ�ƽ�źţ��綯����������ʱ������˷���Ĺ��߱��������գ����ն˽��ղ���������ߣ�����������͵�ƽ�źź���80C51��Ƭ���������ж�ִ����һ��Ԥ�ȱ��Ƶij�����������߳�����ʻ״̬��ǰ��ʱ��������ֱ�������ת,���������ʱ,����Ƭ�����ƽ���PWM��Ƶ����,ͨ�������ı�����������ε�ռ�ձ�,ʵ�ֵ��١�������ƶ�ʵ��ͣ����ǰ���뵹�����Ƶ�·�ĺ�������ʽ��·�ͼ̵��������������������鿪�أ�һ�鳣�գ���һ�鳣����