
��������ܻ����˵�������ϵͳ���
����ע���¼,֧��������ʾ�������ɻ�ȡ������.
��������ܻ�������������ϵͳ���(������,���ⱨ��,����˵����17000��,CAD����ͼ1��)
ժ Ҫ
�����ִ��Ƽ��ķ�չ����ܻ�е�����ִ���������ˮ�ߡ����ϰ��˵ȷ�������Խ��Խ��Ҫ�ļ�ֵ����ΪΪ��ҵ���������ɱ������Ͷ�Ч�ʲ��ɻ�ȱ��һ����Ŀǰ��ܻ�е�ֵĿ���ϵͳ���ڿ��ƾ��ȵͣ�����Ч�ʲ����ߵ����⣬���ľ�PLC���ƺʹ�������ص�������ۣ�����ʵ�ʵ���ܻ�е�ֶ���Ҫ������˶����˶����ƻ�·�Ļ�����ƺ�����ģ��ı�̣���ϵͳ�����幹�죬������·�����Ʒ�ʽ�Լ��������̵ȷ�������������о�
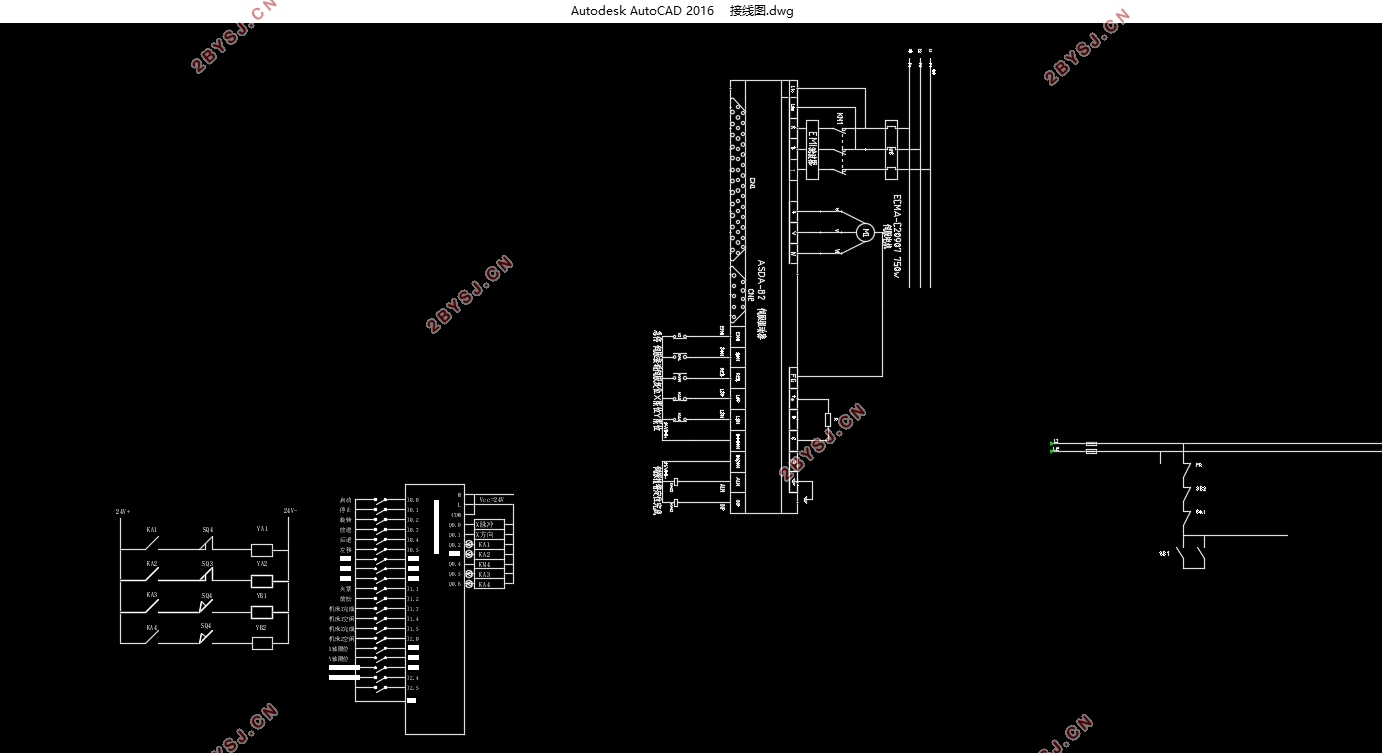
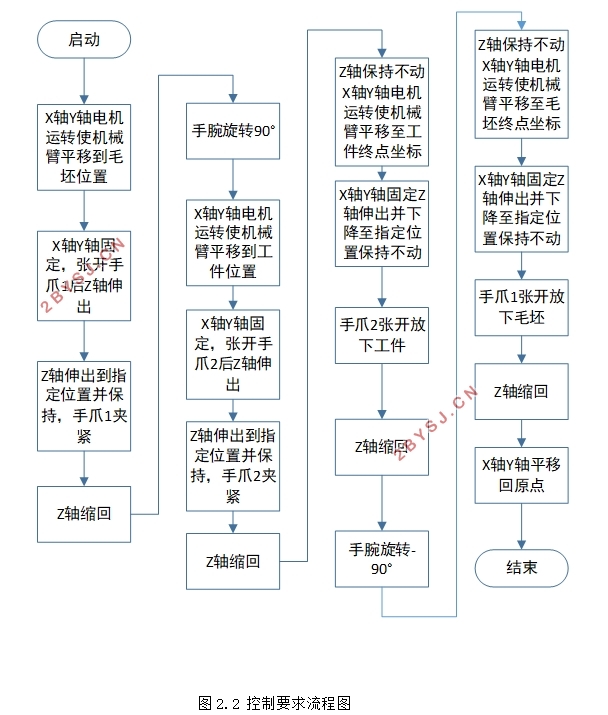
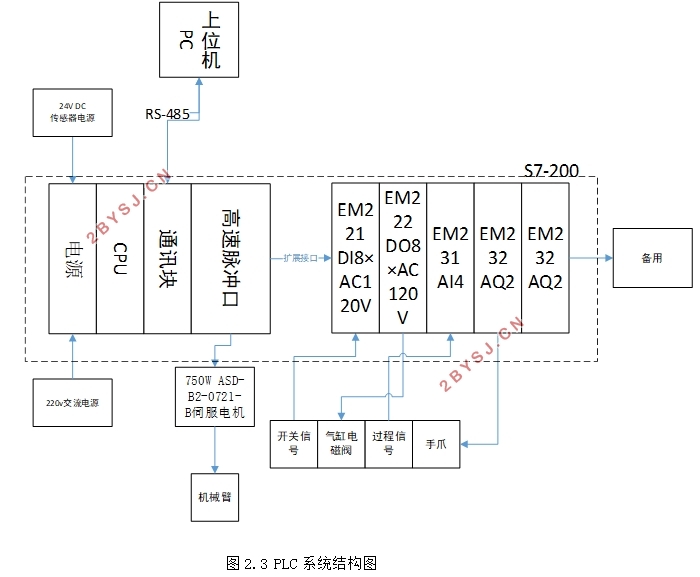
�����ȶ�ʵ�ʵ������������з�����������ܻ�е����Ҫ��ɵĶ������Բ�ͬ�Ŀ��Ʒ�ʽ���бȽϣ�ѡ������������Ϊ����������Ϊ����������Ʒ�ʽ��Ȼ�����ɶ�ץȡ����ķ���ͨ����Ҫ��ת�ٺ�Ť�رȽ��˲���������ŷ����������֮��ѡȡ�ŷ������Ϊ������ģ����ƻ�е�ֵ��ƶ�����ѹ������·��Ϊ������ģ�������צ��ץȡ�����ͨ����I/O���ͳ�ƺͿ������������������ѡ����������S7-200PLC��Ϊ�������������ݿ���Ҫ������ⲿ����ͼ���ڴ˻�������ɶ����������ŷ�ģ�顢��צץȡģ�顢��ԭ���ʾ�̵�ģ�������ͼ�滮�ͳ����д��
�����ص�ǿ������������ŷ����ɱ����������γɱջ�λ�ÿ��Ƶ�ʵ�֣��������ŷ������ѡ�ͣ�PLC���ŷ��������Ľ����ӿ���ƣ�ѡ�������������ŷ�����Ŀ��Ʒ�ʽ��ʵ��������Ҫ��������������Ƶ���Լ��������ֱȵȲ����ļ��㣬PLC�Ա����������IJ���źŵĶ�ȡ�Ͷ��ŷ��������������õȡ������PLC����ѹ������ʽ�е��м�̵�������ŷ��Ŀ��ƻ�·��ơ��ڴ˻�������������˶���ܻ�е�ֿ���ϵͳ����ƺͱ�̡�
�ؼ��ʣ��ŷ���� PLC ������ ����ϵͳ
Design of Electric Control System for Loading and Unloading Truss Robots
Abstract
With the development of modern science and technology, truss manipulators have increasingly important values in modern production lines, material handling, etc., becoming an indispensable link for companies to reduce labor costs and increase labor efficiency. At present, the control system of truss manipulators has the problems of low control accuracy and low transfer efficiency. This paper presents the basic design and software modules of the motion control loop based on the relevant theories of PLC control and touch screen monitoring, according to the actual motion requirements of truss manipulators. The programming has discussed and studied the overall structure of the system, physical circuits, control methods, and control procedures.
This paper first analyzes the actual production conditions, compares the different control methods according to the actions that the truss manipulator needs to complete, and selects the overall control method that is supplemented by the main pneumatic control, and then the target After analyzing the performance of the stepper motor and the servo motor through the required speed and torque, the servo motor is selected as the main drive module to control the movement of the manipulator, and the air pressure drive circuit is used as the auxiliary drive module to control the grasping of the gripper; The statistics of the /O point and the pulse output performance of the controller selected the Siemens S7-200 PLC as the main controller. According to the control requirements, the external wiring diagram was designed and the pulsed servo module, gripper grab module, and origin return were completed. Flowchart planning and programming of modules such as teaching and teaching.
This article emphasizes the realization of the closed-loop position control by the pulse control servo and then feedback from the encoder, including the selection of the servo motor, the connection of the PLC to the servo driver and the interface design, the selection of the direction plus the pulse control servo motor control method, the actual operation The required number of pulses, pulse frequency, electronic gear ratio and other parameters are calculated. PLC reads differential signals fed back by the encoder and sets servo drive parameters. And take into account the PLC control of the intermediate relay, solenoid valve control circuit in the pneumatic drive mode. On this basis, the paper has completed the design and programming of the truss manipulator control system.
Key Words: servo motor PLC Loading and Unloading control systerm
Ŀ ¼
ժ Ҫ I
Abstract III
��һ�� ���� 1
1.1 ��ܻ����˸��� 1
1.2 ��ҵ�����˵ķ�չʷ 2
1.3 ��ܻ����˵��о���״��Ӧ�úͷ�չ���� 2
1.4 �ܽ� 3
�ڶ��� ������Ʋ��� 4
2.1���Ŀ����� 4
2.2��ܻ����˵Ŀ���Ҫ�� 5
2.3������Ʒ���ѡ�� 6
2.3.1����������ʽ��ѡ�� 6
2.3.2 ������͵�ȷ������ 7
2.3.4 Z��������ʽ��ѡ�� 7
2.4����ϵͳ�ṹͼ 8
2.5�����Է��� 9
������ �����·Ӳ����� 11
3.1��е�ֵĿ���Ҫ�� 11
3.2Ӳ��ѡ�� 11
3.2.1 X��������ѡ�� 11
3.2.2 Y��������ѡ�� 12
3.2.3 PLC��ѡ�� 12
3.2.4 ��������ѡ�� 13
3.2.5 ��������ѡ�� 13
3.2.6ģ��������/���ģ���ѡ�� 14
3.2.7 ͨ����ʽѡ�� 14
3.3 I/O��ķ����ͳ�� 15
3.4 PLC�Լ��ŷ��������ⲿ����ͼ 17
3.5�������������ʽ 19
3.6�ŷ�ϵͳ�ĵ�Դ����ͼ 19
3.7��ѹ����ϵͳ����� 20
3.8�ջ�λ�ÿ���ϵͳ�ӿڵ�·��� 22
3.8.1 ����źŴ�����· 24
3.8.2 �����ϴ�����· 24
������ ������� 26
4.1�ϵ��Լ��Լ���������ͼ 26
4.2�Զ��������Ƴ��� 28
4.3�ֶ����Ƴ��� 29
4.4������צ���Ƴ��� 30
4.5��ԭ����� 31
4.6 �ŷ����������Ƴ��� 33
4.7ʾ�̳��� 34
4.8���������� 35
4.9�������������ͼ 37
4.10�ŷ��������������� 38
�ܽ��չ�� 41
����� 42
��¼ 44
�� л 49