
太阳能热水器的自动控制系统(附CAD电气图和机构图)
无需注册登录,支付后按照提示操作即可获取该资料.
太阳能热水器的自动控制系统(附CAD电气图和机构图)(任务书,论文说明书19000字,外文翻译,电气cad图,机构cad图8张)
摘 要
科学家们公认,太阳能是未来人类最合适、最安全、最绿色、最理想的替代
能源。目前太阳能利用转化率约为10%-20%。理论分析表明:太阳的跟踪与非跟
踪,能量的接收率相差37.7%。研究开发太阳能双轴跟踪装置,可以提高太阳能
的接收效率,拓宽太阳能的利用领域。
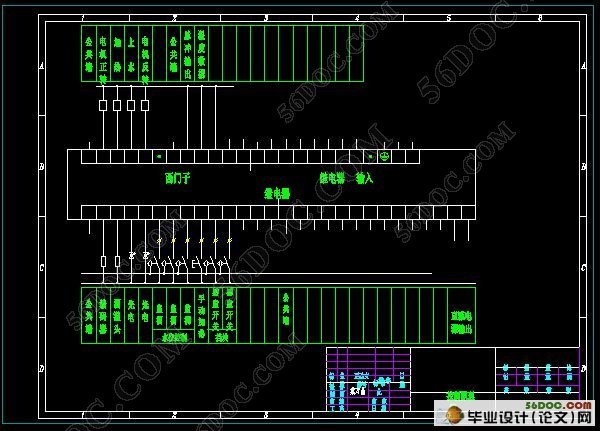
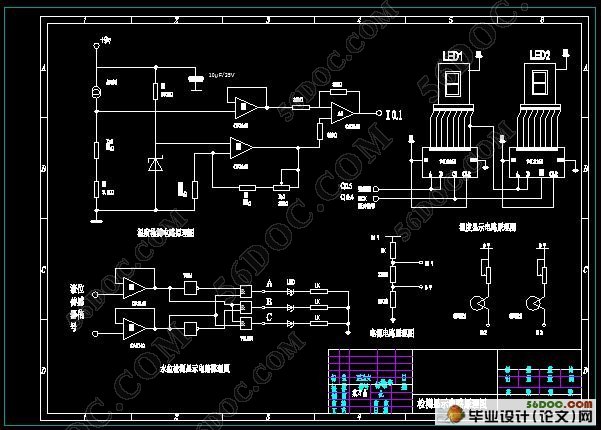
本文研究的内容是基于西门子PLC的太阳能热水器自动控制系统。该系统是根据水温控制上水量,通过水温变化控制跟踪系统运作,采用水平旋转机构实现对太阳方位角的实时跟踪。并针对太阳跟踪装置的工作要求,提出了利用PLC实现跟踪的控制方案。系统采用闭环系统跟踪,即通过垂直水平面安置的特别处理的光电传感器是否感受到太阳的光照,反馈回开关信号,PLC根据该信号通断调用子程序发出脉冲对步进电动机进行驱动直到重新接收到太阳光照,实现了机构对太阳方位的自动跟踪,使跟踪装置的上平台水平方位始终处于垂直于光照方向,达到了能量较大限度的接收。控制系统硬件选用西门子公司的S7-200的PLC作为控制核心来控制机构的执行部件――步进电动机。完成了单片机外围硬件电路的设计和相应的软件的设计。系统驱动器采用了与步进电机配套的专用集成模块,具有强抗干扰性、高频性能好、结构简单、运行平稳等特点。
关键词:步进电动机; 驱动器; S7-200PLC; 光电传感器
ABSTRACT
Scientists generally accept that for mankind the solar energy is the fittest, the most safe, the most green and the most ideal replaceable energy in future .The current solar energy convert ingrate roughly is 10%~20%.Analysis indicated that adopting the solar tracker can increase 37%the rate of receiving energy .Research and development of the two axes solar tracker can increase the reception efficiency and open widely the exploitation realm of the solar energy.
This study is based on the content of the solar water heater Siemens PLC automatic control system. This system is based on the water temperature control, temperature change control tracking system by using level rotating mechanism, to the azimuth of the real-time tracking. Aiming at the request of the job tracking devices using PLC, puts forward the control scheme for real-time fuzzy track. Using the closed-loop system tracking system, namely the vertical plane through special processing photoelectric sensor, the sun shine if feel feedback to switch signals, PLC according to the signal hige subroutine to a pulse stepper motor driven back into the sun shine until reception, realize the organization of the location of the sun, tracking device automatic tracking the platform level position in vertical direction, YuGuangZhao achieved considerable energy. The hardware of control system selection of Siemens S7-200 PLC to control the organization as the core to control execution component - stepper motor. Finish the microcontroller hardware circuit design of peripheral and the corresponding software design. The driver adopted with the system of stepping motor for integration module and strong anti-interference, high performance is good, simple structure, stable operation, etc.
KEY WORDS:stepper motor; Drive; S7-200 PLC; Photoelectric sensor
本文设计了基于PLC设计机构的简易太阳能热水器自动控制系统,包含机构和控制部分,使得其能够跟踪太阳的方位角,实现热水器的高效自动控制。
主要设计内容总结如下:
1. 介绍常见的太阳能跟踪方法,进行简单比较得出各优缺点。为了收集到较多的太阳能,最好采取跟踪方式,是太阳能集热器的采光面水平方向与太阳方位角垂直。通过控制透光狭槽检测光线的方向实现对太阳方位角跟踪。
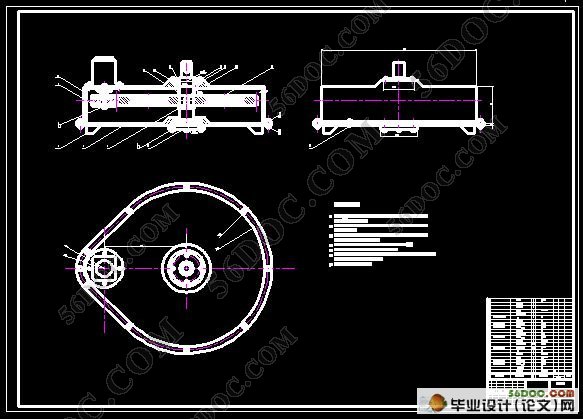
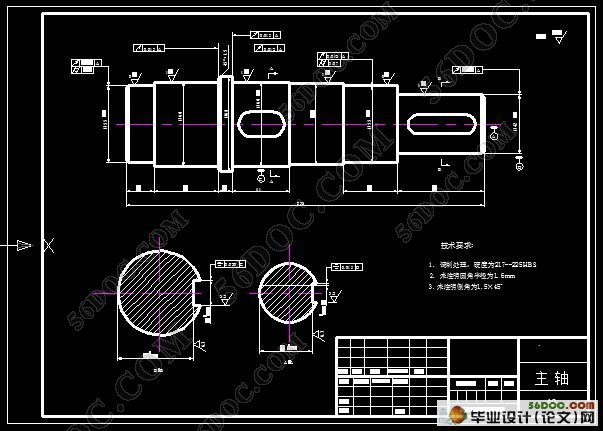
2. 控制部分采用西门子PLC,对控制方法作了说明。本设计采用的电子器件都是普通的电子元器件,一方面降低成本,另一方面也为后续的维护提供便利。设计减速器,为使对步进电机起到降低转速、增大转矩的作用。
3. 对执行元件和反馈元件的选取进行设计。执行部件采用步进电机,步进电机是数字控制电动机,适合可编程逻辑控制器控制。
本设计主要那内容及意义
太阳跟踪装置的研究是提高太阳能利用率的一种重要途径。研究较为精确的太阳跟踪装置,可使接收器的热接受率大大提高,进而提高太阳能装置的利用率,拓宽太阳能的利用领域。本文所介绍的控制系统采用S7-200的PLC作为控制芯片,十分适用于太阳跟踪装置,表现在:使用过程中成本低廉,性能与相对简单的太阳跟踪系统匹配;闭环控制系统,可以达到较高的精度,并有可能通过串行通信实现远程监控和模块化处理;可处理多个中断,系统运行后可能出现以前没有考虑到的特殊情况,相应的扩充对策十分简单。
本课题的主要研究内容:
1.分析太阳跟踪装置的结构特点和运动分析及可能的工作状态,提出合理的控制策略。
2.根据所需完成的任务选取控制芯片,并分析系统的软硬件需求。
3.根据所提出的控制策略设计控制系统,选择合适的控制执行部件即步进电机。
4.根据软硬件需求和芯片资源进行软硬件设计,选取恰当的传感器,合理设计外围电路,编制控制程序,实现自动控制。
太阳能热水器自动控制结构设计
根据基于PLC太阳方位角追踪平台的设计,机械部分设计应该满足以下要求:1、机械执行机构能够进行很大范围的跟踪。因此,机械执行机构的运动行程应满足跟踪范围的要求,并要避免极限位置锁死;2、为了降低系统成木,控制系统拟采用普通直流电机驱动跟踪平台;3、在满足以上性能的同时,尽量简化结构和加工工艺,机械部件的选择也多参考普通机械零部件的标准,进一步提高技术的经济性。
本设计中提出的跟踪不仅是用在太阳能热水器上,在一般的太阳能利用场合也可以采用,若是精度要求高的可以在此装置上叠加一套高度角追踪的装置,其原理和设计思路依旧可以采用本设计。例如:太阳能屋顶发电、太阳灶、太阳空调、聚光―光纤传输型照明等,太阳能追踪装置一般是固定安装的。当然,在机构设计上稍作改进,也可以用在运动中的跟踪系统,如卫星太阳能电池板,船舶上的太阳能集热板等。

#p#副标题#e#
目 录
第1章 绪论 1
第1.1节 利用太阳能的意义 1
第1.2节 太阳跟踪方式的发展概况 3
第1.3节 一种跟踪器的简介 7
第1.4节 本设计主要那内容及意义 9
第2章 太阳能热水器自动控制结构设计 10
第2.1节 太阳方位角的追踪 10
第2.2节 齿轮传动式跟踪平台 11
第3章 控制系统的总体方案设计 15
第3.1节 控制系统的选取 15
第3.2节 PLC的控制系统 19
第3.3节 基于PLC机构的太阳方位角追踪控制方式 20
第3.4节 控制系统的原理图 22
第4章 控制系统的硬件设计 23
第4.1节 系统参数的确定及减速器的设计 23
第4.2节 步进电机工作原理 34
第4.3节 步进电机及驱动器型号的选择 38
第4.4节 光电传感器选择 40
第4.5节 其他电子器件选择 41
第5章 控制系统软件及程序编制 43
第5.1节 S7-200PLC简介 44
第5.2节 控制系统程序设计 45
第6章 结论与展望 47
参考文献 49
附录1.控制程序 50
致 谢 66