
棉花采集机械手的设计(含CAD零件图装配图,SolidWorks三维图)
无需注册登录,支付后按照提示操作即可获取该资料.
棉花采集机械手的设计(含CAD零件图装配图,SolidWorks三维图)(开题报告,论文说明书9000字,CAD图8张,SolidWorks三维图)
摘要
棉花作为重要的纺织原料,是全球范围内重要的经济作物之一。棉花的种植区域较为广泛,主要的集中区在亚洲大陆南部、美国南部、拉丁美洲、非洲和澳洲五大棉区。在国内,棉花主要分布在新疆、安徽、河北等地。根据统计局的数据,我国在2018年种植棉花的面积达到了335.4万公顷。随着我国棉花种植区域的不断增加,棉花的采摘也成为了制约棉花经济效益的因素之一。现在棉花的采摘主要分为人工采摘和机械采摘,人工采摘的特点是效率低、成本高。但是相对灵活,不受规模限制。机械采摘的特点与人工相反。效率高但收到种植规模影响。较小的种植规模不适合使用机械进行采摘。采摘机械手的设计就是填补了人工采摘和机械采摘的空白。小巧灵活的机械手可以在小规模种植区域达到比较高的工作效率,同时,相比起人工高额的采摘成本和劳动强度,采摘机械手也可以显著的降低两者的成本。所以,棉花采摘机械手更适合我国棉花种植行情。针对我国棉花种植区域不集中的特点,开发出适合国内使用的农业机械。
大力发展自动机械是有很大的前景的。机器人的发展是由于它的积极作用正日益为人们所认识:其一、它能部分的代替人工操作;其二、它能按照生产工艺的要求,遵循一定的程序、时间和位置来完成工作;其三、它能大大的改善了工人的劳动条件,显著的提高了劳动生产率,加快实现工业生产机械化和自动化的步伐。因而,受到很多国家的重视,投入大量的人力物力来研究和应用。
关键词:棉花采摘机械手设计
ABSTRACT
As an important textile raw material, cotton is one of the important economic crops in the world. Cotton is planted in a wide range of regions, mainly in the southern part of the Asian continent, the southern United States, Latin America, Africa and Australia. In China, cotton is mainly distributed in Xinjiang, Anhui, Hebei and other places. According to the data of the Statistics Bureau, the cotton planting area in China reached 3.354 million hectares in 2018. With the continuous increase of cotton planting areas in China, cotton picking has become one of the factors restricting the economic benefits of cotton. At present, cotton picking is mainly divided into manual picking and mechanical picking. Manual picking is characterized by low efficiency and high cost. However, it is relatively flexible and not limited by scale. Mechanical picking is contrary to manual picking. High efficiency but affected by planting scale. Smaller planting scale is not suitable for picking with machinery. The design of picking manipulator is to fill the gap between manual picking and mechanical picking. Small and flexible manipulator can achieve relatively high work efficiency in small-scale planting areas. At the same time, compared with the high manual picking cost and labor intensity, the picking manipulator can also significantly reduce the cost of both. Therefore, cotton picking manipulator is more suitable for China's cotton planting market. The agricultural machinery suitable for domestic use has been developed according to the characteristics of decentralized cotton planting areas in China.There are great prospects for vigorously developing automatic machinery. The development of robots is due to the fact that its positive effects are becoming increasingly recognized by people: first, it can partially replace manual operations; second, it can complete the work in accordance with the requirements of the production process, following a certain procedure, time and location; Third, it can greatly improve the working conditions of workers, significantly increase labor productivity, and accelerate the pace of mechanization and automation of industrial production. Therefore, it has received the attention of many countries and invested a lot of manpower and material resources in research and application.
Keywords: writing, manipulator, design
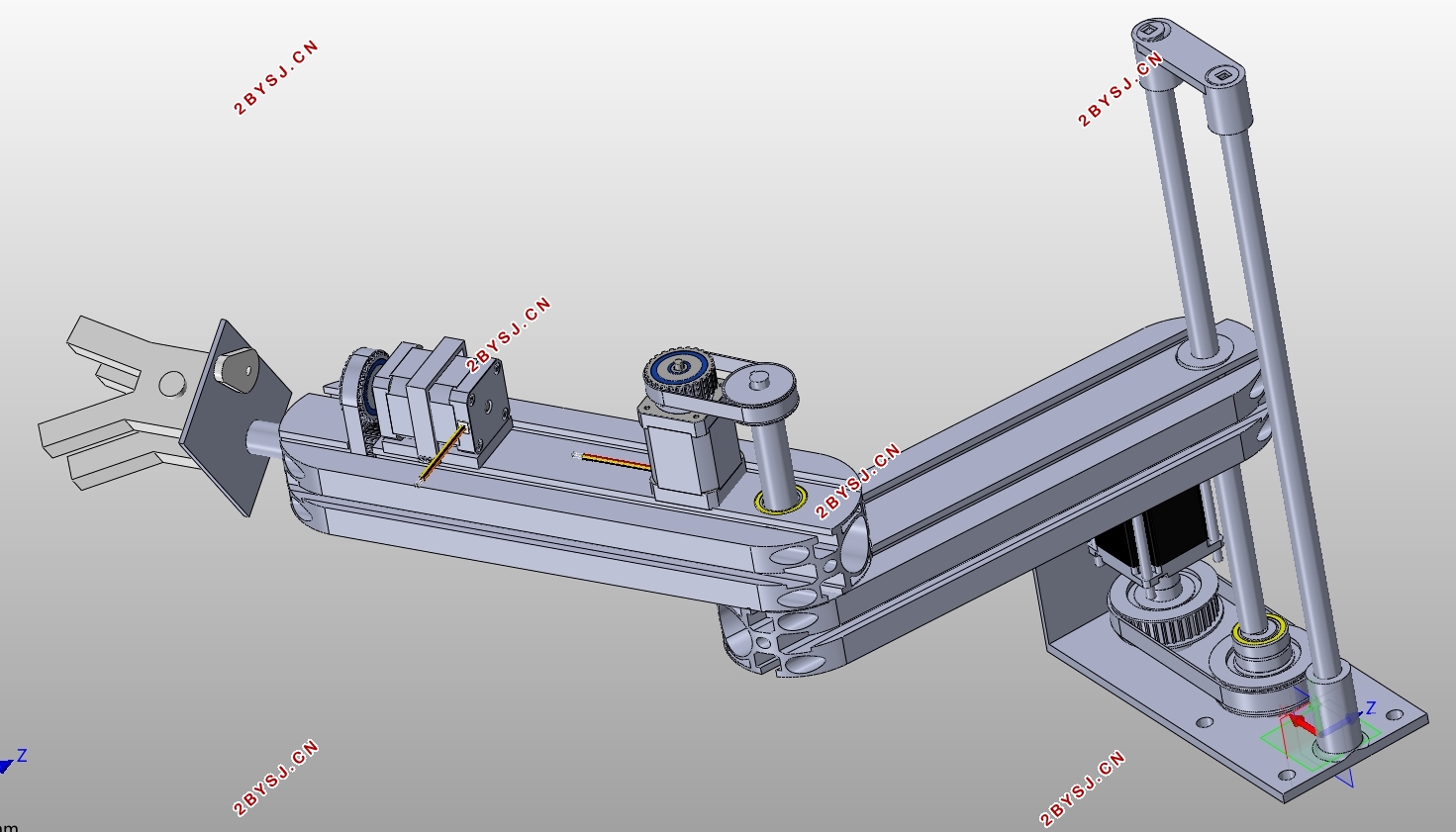
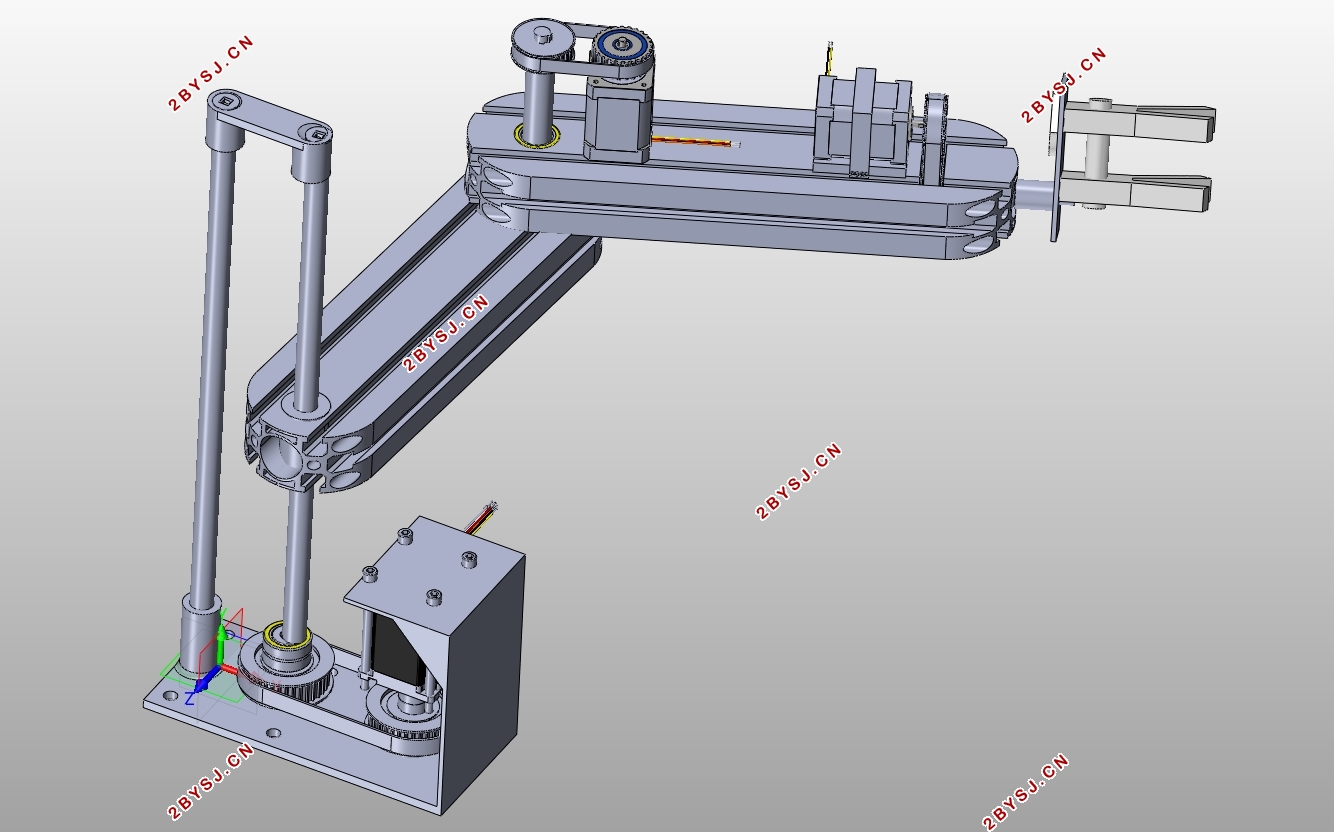
本文所设计的棉花采摘机械臂的具体参数如下:腕关节回转范围±45°最大转速25r/min,肘关节移动范围220mm,最大移动速度50~100mm/min
具体任务要求如下:
1.根据棉花采摘机器人工作原理和性能参数的要求,计算相关的技术参数。
2.合理设计棉花采摘机器人的整体结构,确定设计思路,并绘制出整体结构示意图。
3.具体结构的确定,零部件的尺寸设计、校核计算,进行电机的选择,传动装置的设计。
4.绘制各个零部件及机构的图纸。





目录
摘要 1
ABSTRACT 2
一、绪论 4
1.1 引言 4
1.2国内外研究现状 4
二、总体方案设计 6
2.1、总方案论述 6
2.2 总体方案设计 6
三棉花采摘机械臂大臂的结构设计 8
3.1 设计基本要求 8
3.2 机构设计 8
3.3 驱动系统选型 9
3.4 承载能力计算 9
四、棉花采摘机器人末端结构设计 14
4.1 结构设计与校核 14
五、传动结构的设计 22
5.1 轴的设计 22
5.2 轴承校核 29
六、总结 33
七、致谢 34
八、参考文献 35