
两轮移动机器人(自平衡车)机械及控制系统设计(附CAD零件图装配图)
无需注册登录,支付后按照提示操作即可获取该资料.
两轮移动机器人(自平衡车)机械及控制系统设计(附CAD零件图装配图)(任务书,开题报告,外文翻译,论文说明书17000字,CAD图5张)
摘 要
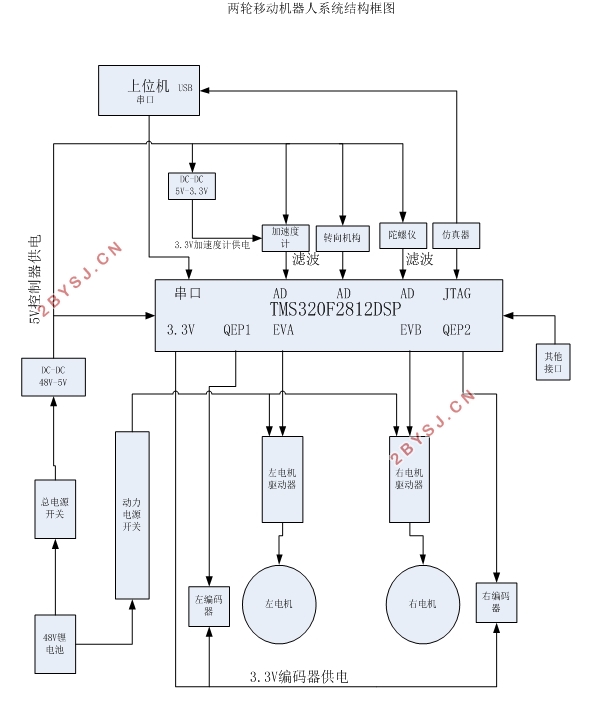
近年来,两轮移动机器人发展迅速,技术越来越成熟。两轮自平衡车越来越多的出现人们的视野,两轮自平衡车是一种可靠、便捷、环保的短途运输交通工具,它占地面积小,通过路面的能力强,并且非常灵活,适用于场馆、机场等地。本文提出了一种两轮移动自平衡车的设计方案。采用陀螺仪和加速度传感器构成自平衡车的姿态检测装置,使用卡尔曼滤波完成陀螺仪数据和加速度传感器数据的数据融合。采用德州仪器公司的TMS320F2812 DSP处理器为控制核心,完成传感器的数据处理,滤波算法的实现和车身运动状态的控制等。
本文设计了一种两轮自平衡车的简单模型,包括机械部分设计、控制原理及控制部分的元器件选型等。
关键词:两轮移动自平衡车 机械设计 卡尔曼滤波 姿态检测
Abstract
In recent years, Two rounds of mobile robot is developing rapidly, the technology is more and more mature. Two rounds of self-balancing vehicle appears more and more people's horizons, the two rounds of self-balancing vehicle is a kind of reliable and convenient, environmental protection and short-distance transportation vehicles, it covers an area of small, it has the ability to through the pavement, and it is very flexible , and it is applicable to the venue, airport, etc. This paper presents a design scheme of the two rounds of self-balancing vehicle. Gyroscope and accelerometer is adopted to form the equilibrium position detection device. System adopts Kalman filter to complete the gyroscope data and accelerometer data fusion, and adopts TMS320F2812 of TI company DSP processor as the core. The center controller completes sensor data processing, the realization of the filtering algorithm and body motion control, etc.
In this paper, we design a simple model of two rounds of self-balancing vehicle, including mechanical parts design, control principle and control components selection, etc.
Key Words: Two rounds of mobile self-balancing vehicle; Machinery Design; Kalman filtering; Gesture measuring
两轮自平衡机器人
该机器人有65cm高、重约12kg,最大速度可达1.5m/s,可爬30度的斜坡。机器人双轮同轴布置,分别有独立电机驱动。机器人通过选用陀螺仪作为传感器来获得机器人姿态信息,控制系统的硬件核心主要由Sharc公司的DSP、XILINX公司的FPGA,D/A转换器和A/D转换器构成。控制策略采用基于状态反馈的线性控制策略,把机器人的运动解耦成直线运动和旋转运动,然后对直线运动和旋转运动分别进行控制系统的设计,得出机器人电机所需的控制量,最后把两部分所得的控制量进行耦合叠加。Joe能稳定地做U型回转和零半径回转。

目录
摘 要 I
Abstract II
第一章 绪论 1
1.1课题研究的背景及意义 1
1.2国内外研究现状分析 2
1.2.1国外发展现状 2
1.2.2国内发展现状 4
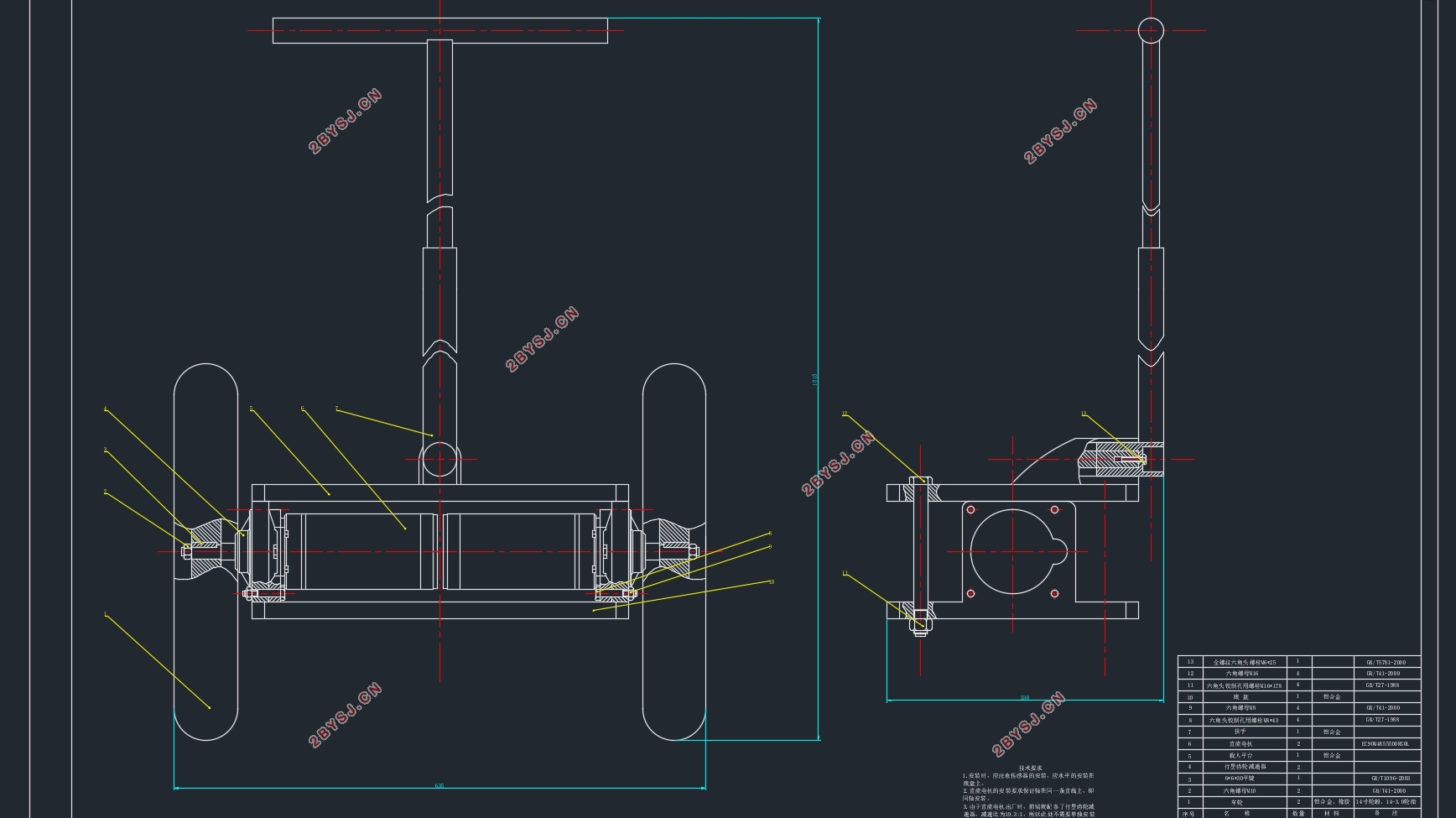
第二章 两轮自平衡移动机器人机械系统设计 7
2.1 机械系统总体设计要求 7
2.2 机械系统设计方案 8
2.2.1底盘结构 8
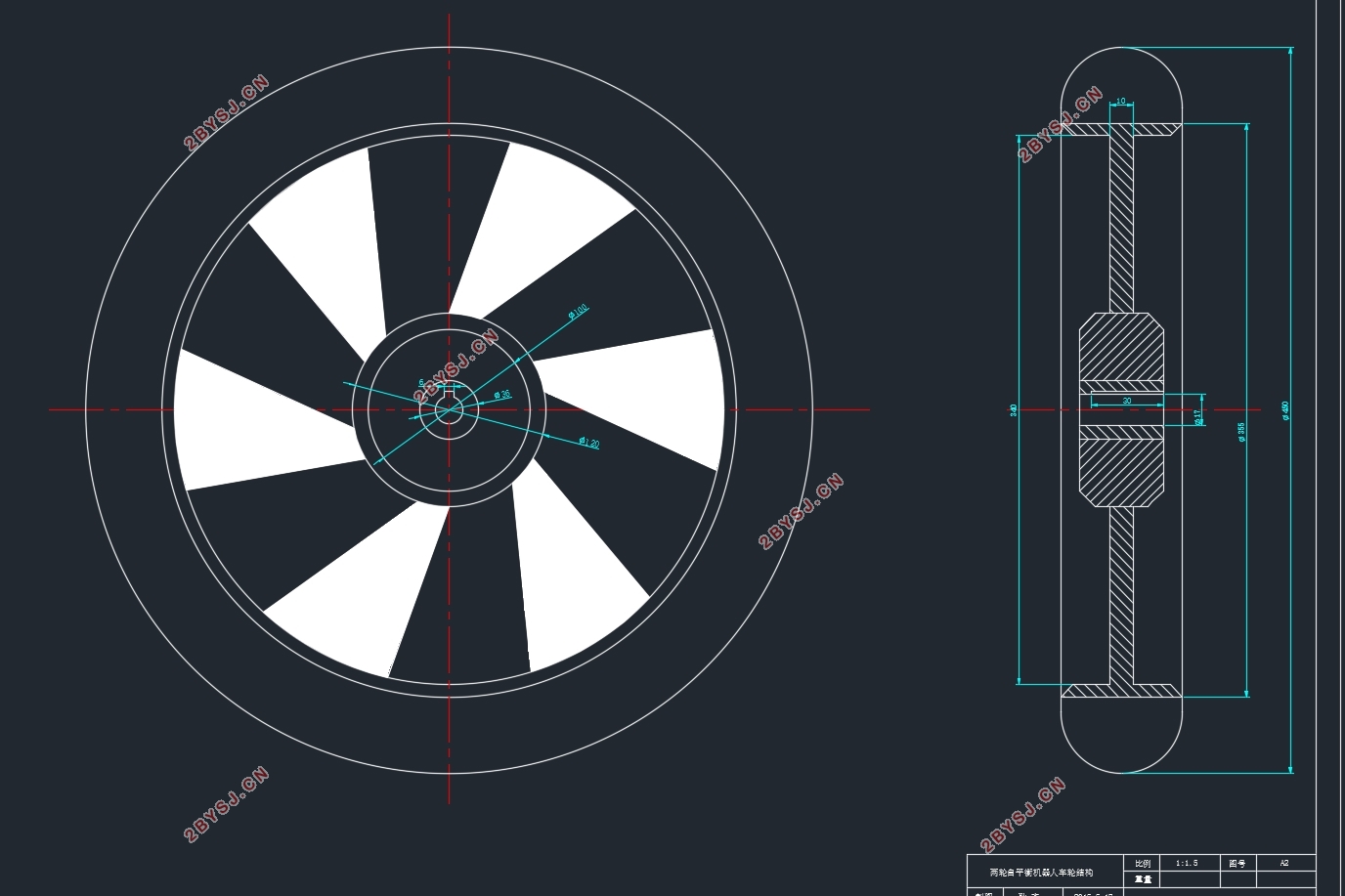
2.2.2车轮 8
2.2.3扶手 9
2.2.4各部分连接方式 9
第三章 两轮自平衡移动机器人的平衡原理 12
3.1两轮自平衡车的平衡条件 12
3.2两轮自平衡小车受力分析 13
3.3自平衡小车运动微分方程 17
第四章 控制系统硬件设计 19
4.1直流电机的选择 20
4.2直流电机驱动器选择及驱动电路的设计 22
4.2.1直流电机驱动器 22
4.2.2驱动电路设计 24
4.3微处理器选择 24
4.4姿态检测装置 28
4.4.1加速度传感器 28
4.4.2陀螺仪 30
4.4.3基于卡尔曼滤波的数据融合 33
4.4.4转向机构 35
4.4.5光电编码器 36
4.5电源系统设计 36
第五章 控制系统软件设计 38
5.1预先设计的运动状态 38
5.2软件系统框架设计 38
5.3 DSP处理器初始化软件设计 39
5.3.1模数转换器模块初始化 39
5.3.2串行通信模块(SCI)初始化 40
5.4控制相关的软件函数 41
第六章 总结 43
致谢 44
参考文献 45