
五自由度工业上下料机械臂设计(含CAD图,PROE三维图)
无需注册登录,支付后按照提示操作即可获取该资料.
五自由度工业上下料机械臂设计(含CAD图,PROE三维图)(任务书,开题报告,论文说明书9000字,CAD图纸8张,PROE三维图)
摘 要
本次设计的物料加工上下料机械手根据规定的动作顺序,综合运用所学的基本理论、基本知识和相关的机械设计专业知识,完成对机械手的设计,对机械手的工作原理,结构使用范围,特点参数选择等方面进行了阐述。
机械手可在空间抓、放、搬运物体,动作灵活多样,适用于可变换生产品种的中、小批量自动化生产,可以广泛地应用于柔性自动线上。机械手多半由耐高温,抗腐蚀的材料制成,能适应较为恶劣的现场环境,大大降低了工人的劳动强度,提高了工作和生产效率。机械手是工业机器人的重要组成部分,在很多情况下它就可以称为工业机器人。工业机器人是集机械、电子、控制、计算机、传感器、人工智能等多学科先进技术于一体的自动化装备。广泛采用工业机器人,不仅可以提高产品的质量与产量,而且对保障人身安全,改善劳动环境,减轻劳动强度,提高劳动生产率,节约原材料的消耗以及降低生产效益成本,有着异常重要的意义。
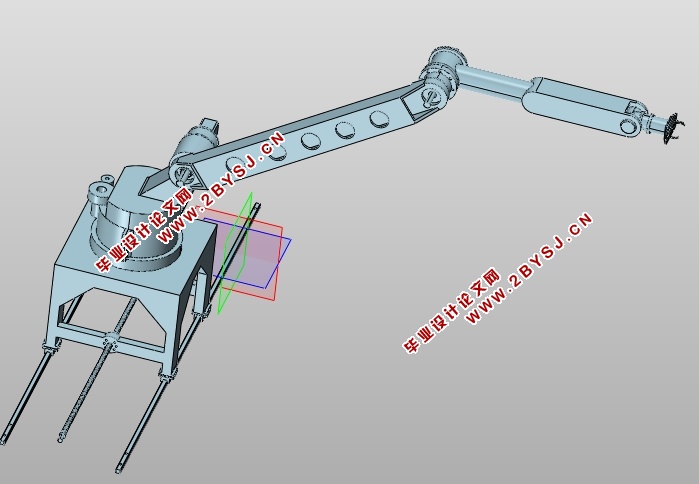
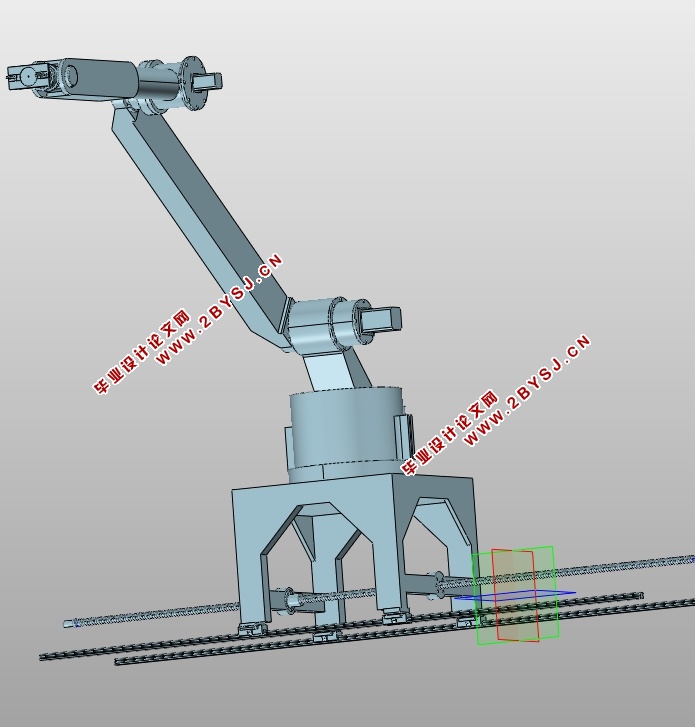
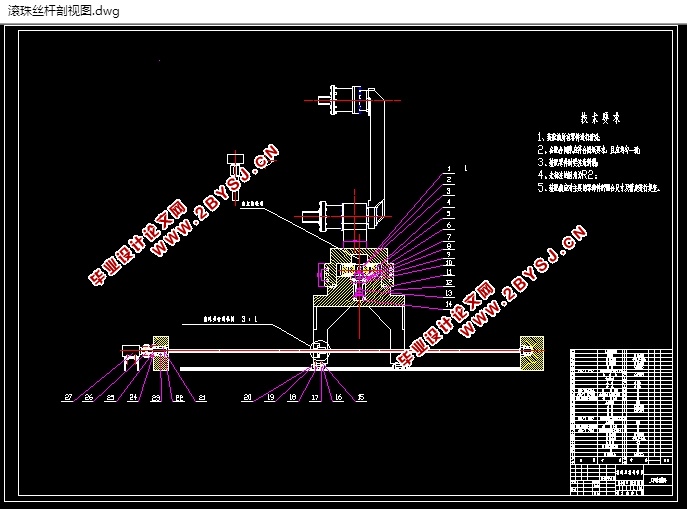
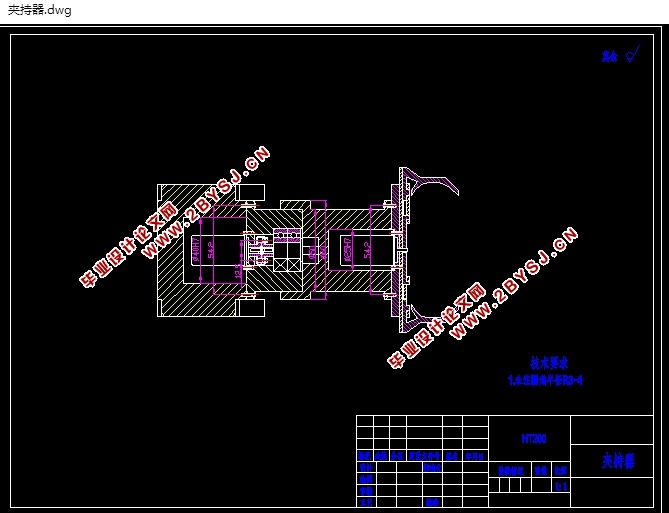
为了方便,准确地进行工业机械手的设计,本设计利用 CAD软件强大的建模功能对五自由度机械手进行设计。机械手具有五个自由度,包括大臂回转、小臂回转、手腕回转、手部夹持和底座前后移动,本文主要介绍了机械手的各个组成部分的机构设计和选择,如机械手驱动装置的设计,传动机构设计,执行机构设计等。重点设计了夹持器设计。
【关键词】:机械手,建模,夹持器
1.3设计初始参数
1、 确定五个自由度,平移和旋转均应该包含,工件的质量为30kg,
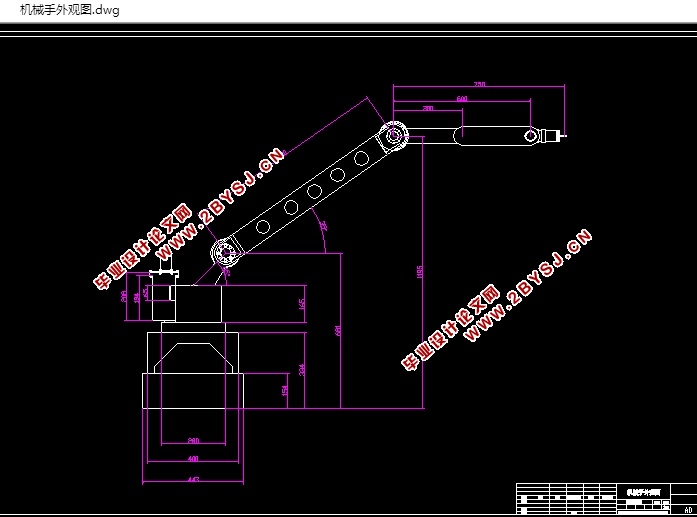
2、 纵向作业行程400mm;
3、 横向作业行程100mm;
4、 升降作业行程80mm;
5、 腕部回转角度范围0-360 o;
6、 手指可以在2m*1m*1m的空间内抵达任意位置和和任意角度;
7、 机械臂工作台高度约1.5m,工作能源为电能;
8、 最大平移速度不大于20mm/s,最大旋转速度不大于每秒。
2 总体方案设计
上下料机械手的基本需求是机械手可以安稳、准确地抓取、转移和放置工件。这就需求它具有高精度、安稳牢靠,必定的承载能力,能在必定的工作空间范围内完结机械手的各部分动作,实现手部可以按必定的运动轨道准确达到设定的方位。机械手主要是由执行组织、驱动系统、控制系统及方位检测装置等构成,依据课题使命,机械手的执行组织以及驱动组织是本次设计的主要使命。
2.1初步分析
本次机械手抓重为30kg,按工业机械手分类属于小型。机械手的基本形式有直角坐标型、圆柱坐标型和球坐标型以及关节型机械手。本次课题要求它具有高精度、稳定可靠,一定的承载能力,能在一定的工作空间范围内完成机械手的各部分动作,实现手部能够按一定的运动轨迹精确达到设定的位置。所以本课题选择了一种关节型机械手方案。本课题机械手主要由机座、大臂、小臂、腕部及手部等组成。由于本次设计需求机座的平移:大臂旋转;小臂旋转;手腕旋转;手部夹持;底座移动5个主要运动,因此此次设计的自由度为5。

目 录
摘 要 1
1 绪论 5
1.1设计初始参数 5
2 总体方案设计 7
2.1初步分析 7
2.2 执行机构 7
2.3 驱动机构 8
3 手部的结构设计及计算 9
3.1 手部夹持范围与精度的分析计算 9
3.2 手部设计 9
3.3手指行程范围的计算 10
3.4 驱动电机选择 11
4 腕部设计 12
4.1 腕部设计基本要求 12
4.2 腕部结构的选择 12
4.3腕部驱动力矩的计算 12
4.4 腕部驱动电机的选择 13
5 臂部的设计 14
5.1 臂部设计的基本要求 14
5.2臂部结构选择 14
5.3臂部力矩的计算 14
5.4臂部电机选择 15
5.4.1 大臂电机选择 15
5.4.2 小臂电机选择 16
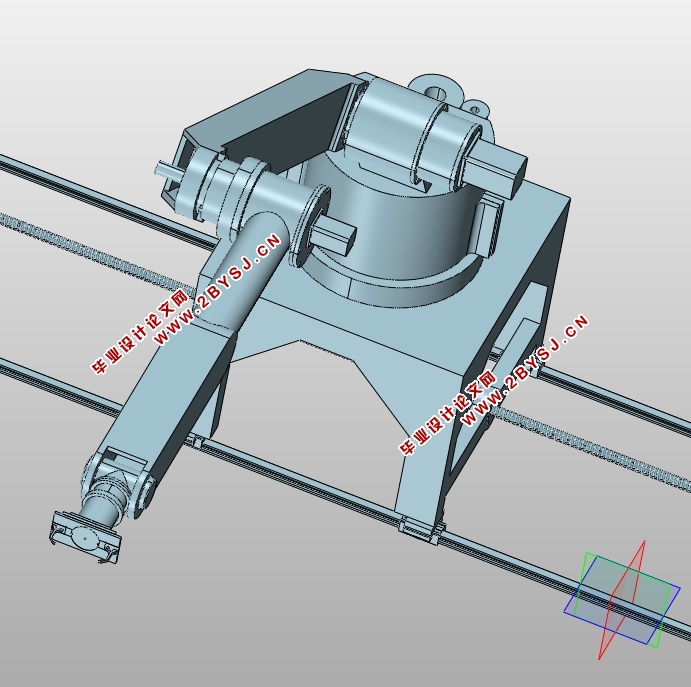
6 底座旋转的设计 17
6.1底座的结构选择 17
6.2底座驱动计算 17
6.3底座驱动电机选择 18
6.4 底座传动齿轮的设计计算 19
6.5 轴的结构设计 21
6.5.1拟定轴上的装配方案 22
6.5.2轴的力矩扭矩分析 23
总结 26
致 谢 27
参考文献 28