
四自由度码垛机器人设计(含CAD零件装配图)
无需注册登录,支付后按照提示操作即可获取该资料.
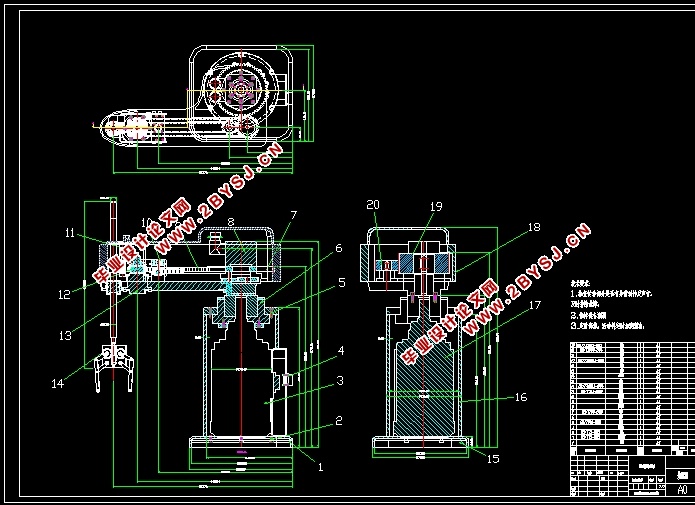
四自由度码垛机器人设计(含CAD零件装配图)(任务书,论文说明书12000字,CAD图纸6张)
本文就四自由度码垛机器人的未来发展趋势和目前状况作出了相应的概括。根据相应的指标、参数,在满足标准化型材的前提下对四自由度码垛机器人的整体进行结构设计。关于一些重要的零部件做了详细分析和原理作用。因为,四自由度码垛机器人在工作的过程中会受一些应力的影响进而可能会发生变形,以确保四自由度码垛机器人能夹取出精度比较高的产品。而且它要求的是在最小的尺寸空间里能够实现三个运动方向运动范围的最大化。本文设计中主要使用了CAD、 等工程制图软件,用二维画图,CAD画出二维码垛机器人图。
关键词:四自由度码垛机器人,结构设计,二维画图
目 录
摘要 1
1四自由度码垛机器人研究的目的和意义 2
2 四自由度码垛机器人国内外发展现状 2
3 四自由度码垛机器人的分类 3
第一章 四自由度码垛机器人设计 4
1.1毕业设计目的 4
1.2本课题的内容和要求 5
第二章 夹取机构设计 6
2.1手部设计计算 6
2.2 导向装置 7
2.3 平衡装置 7
2.4 手臂升降的尺寸设计与校核 8
2.5 手臂的尺寸设计与校核 9
2.6传动设计计算 12
2.7臂回位夹取机构设计 12
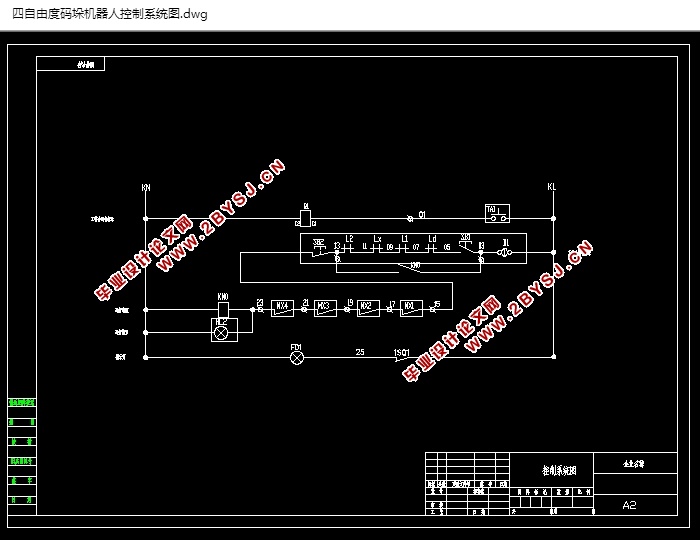
第三章 控制系统设计 13
3.1 四自由度码垛机器人控制系统分类 13
3.2 控制系统方案分析 13
3.3 控制系统特点 13
3.4 四自由度码垛机器人的控制系统方案确定 14
第四章 机身机座的结构设计 15
4.1电机的选择 16
4.2减速器的选择 17
4.3螺柱的设计与校核 17
第五章 四自由度码垛机器人固定方式 19
5.1常用的定位方式 19
5.2 影响因素 19
5.3四自由度码垛机器人运动的缓冲装置 20
第六章 四自由度码垛机器人的控制 21
第七章 四自由度码垛机器人的组成与分类 22
7.1四自由度码垛机器人组成 22
7.2四自由度码垛机器人分类 22
总结 24
参考资料 25