
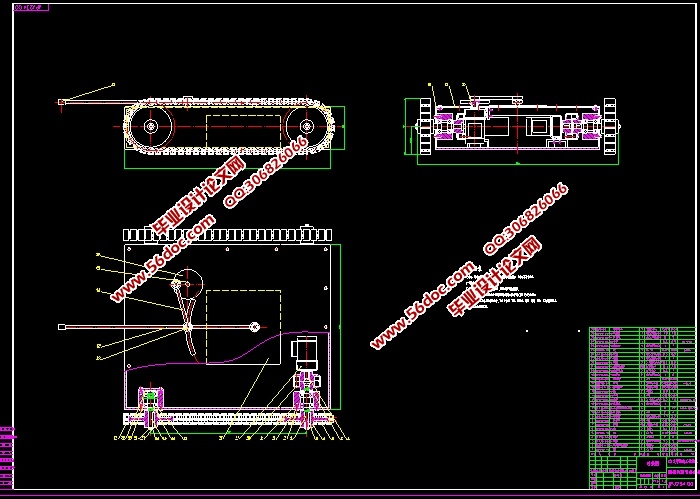
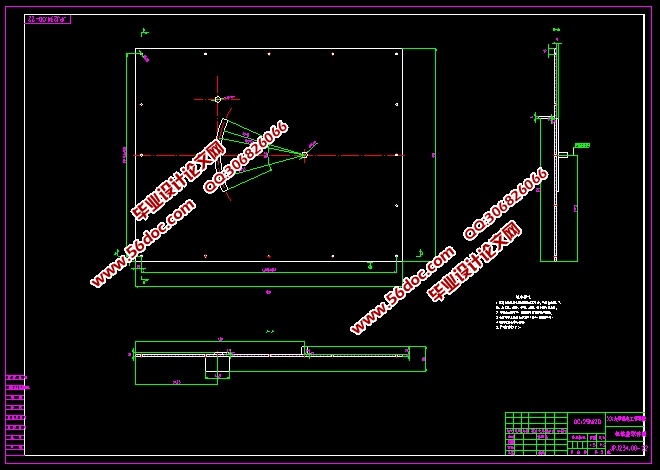
舰船表面喷漆机器人的结构设计(含CAD零件装配图)
以下是资料介绍,如需要完整的请充值下载. 本资料已审核过,确保内容和网页里介绍一致. 密 惠
无需注册登录,支付后按照提示操作即可获取该资料.
无需注册登录,支付后按照提示操作即可获取该资料.
资料介绍:
舰船表面喷漆机器人的结构设计(含CAD零件装配图)(任务书,外文翻译,设计说明书17700字,CAD图8张)
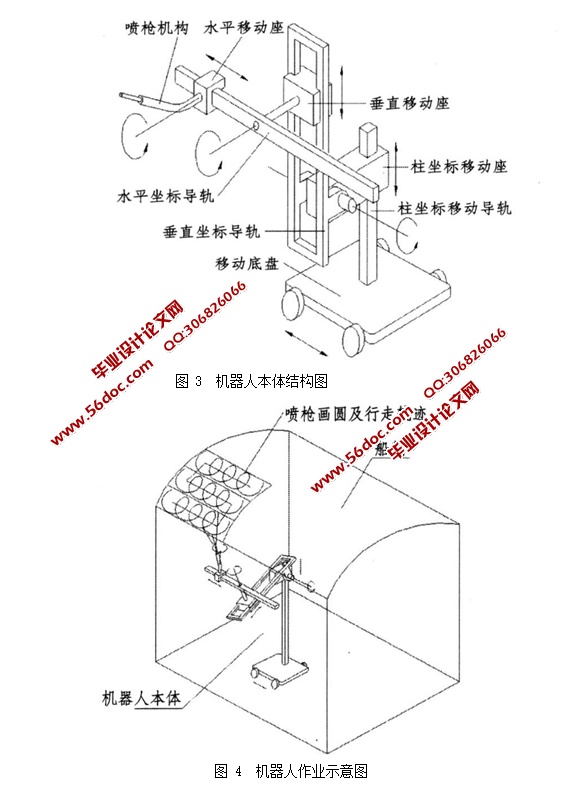
由于海洋舰船运行环境对船体的腐蚀程度严重,长时间运行的舰船表面会产生氧化锈蚀现象,因此对其必须进行定期的除锈喷漆维护,以确保舰船运行的安全性。舰船除锈是为了去除船体钢铁表面的氧化层和锈蚀物以及旧漆层,彻底的除锈可为喷漆提供良好的接触基底,从而确保喷漆的质量,更好地实现对船体的保护。利用爬壁机器人进行喷漆作业一方面可以实现生产自动化,保持干燥的作业环境,提高工效和施工质量;另一方面可以减轻操作工人的劳动强度,改善工作环境,降低环境污染,有益于其身心健康。该机器人的特点是可根据实际作业空间尺寸的需求更换合适的执行机构,以满足不同的工况,操作工人通过遥控能够控制各自由度的协调动作实现三维空间作业。
目 次
1 引言 1
1.1 课题简介 1
1.2 国内外爬壁机器人的现状 1
1.3 爬壁机器人的发展趋势 3
2 舰船表面喷漆机器人的方案设计及选择 5
2.1 方案设计1 5
2.2 方案设计2 8
2.3 方案选择 16
3 设计计算 16
3.1 机器人的运动学模型 16
3.2 机器人本体材料的选择 22
3.3 传动方式的选择 23
3.4 传动机构的设计 23
3.5 驱动方式的选择 25
3.6 轴的设计 28
3.7 轴承的选择和校核 29
3.8 联轴器的选择 30
3.9 磁块单元设计 30
3.10 喷枪的选择 33
4 设计总结 34
致 谢 35
参 考 文 献 36