
地下打孔机器人气压传动系统设计(含CAD零件装配图)
无需注册登录,支付后按照提示操作即可获取该资料.
地下打孔机器人气压传动系统设计(含CAD零件装配图)(任务书,开题报告,外文翻译,设计说明书9300字,CAD图5张)
4.1主要技术性能指标
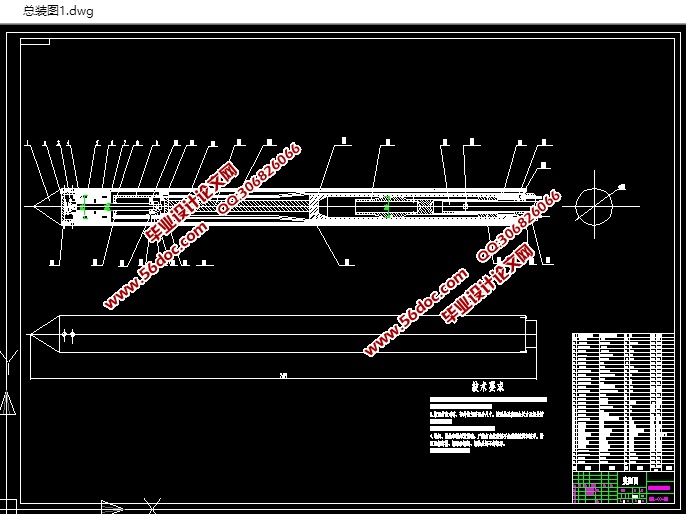
(1)规格:直径*长度65mm*1365mm,质量约14kg;
(2)供气(工作)压力:0.6-0.8MPa;
(3)冲击能:37-54J;
(4)冲击频率:300次/min;
(5)前进速度:0.4-1.5m/min;
(6)冲击气缸供气管规格:25mm,转向机构供气管规格:8mm;
(7)牵引负载方式:供气管线、细钢缆。
4.2 方案组成及工作原理
机器人机体、供气管线、气压空压机、信号接收器及微型计算机控制装置组成了我们所设计的道路地下打孔机器人。其中,道路地下打孔机器人本体包括锥形钻头、转向机构、冲击机构三个部件。其工作原理为:将将要作出的穿孔路径轨迹图形用规划软件设计出来输入到微机中,人工调整埋到机器人钻入地面的角度,然后在微机处控制机器人,使气动空压机开始处于工作状态,通过对微机的控制,实现机器人自动化,完成机器穿孔工作。
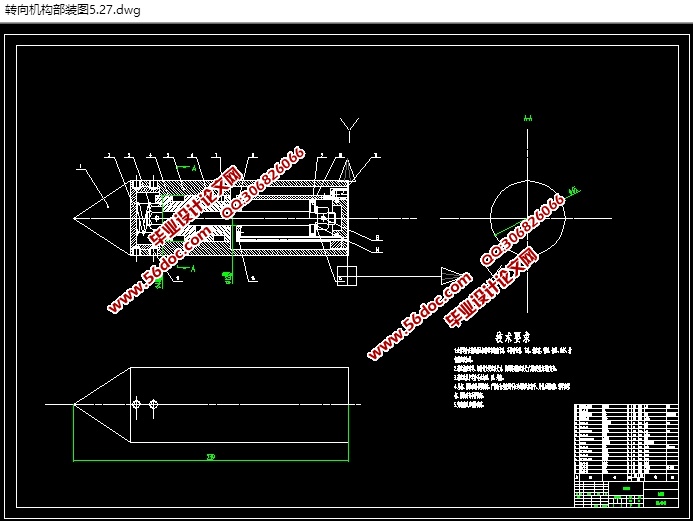
直线轨迹,通过微机界面控制气压的传动,实现对转向机构的控制从而使它产生旋转运动。锥形钻头以一定的速度均匀旋转,启动二位二通电磁阀使空压机向冲击机构提供气压,产生冲击运动,这样机器人就往前运动,形成的轨迹形状就是直线形状。
曲线轨迹,在钻孔过程中需要调整前进的轨迹,控制微机发出指令,使空压机发出气压给转向机构,转向机构带动锥形钻头转过一定的转角后固定,转向机构不再旋转,冲击机构继续进行冲击。这时,产生的孔的轨迹形状就是由锥形钻头偏转形成的轨迹形状,这轨迹就为曲线轨迹孔。
通过检测机器人在穿孔过程中其各个部位的性能参数反馈到微机控制界面,根据实际轨迹的轨迹偏差,并调整计划的前进道路。当机器人穿出地面以后,把想要铺设的管线接在机器人机体上,再使机器人从已经穿过的孔中行驶一遍,这样就使管线铺设在地下。
目录
1 引言 1
2国内外道路地下打孔机器人的发展状况 2
2.1 国外道路地下打孔机器人的发展状况 2
2.2 国内道路地下打孔机器人的发展状况 5
3.实地调研 6
4总体技术方案 7
4.1主要技术性能指标 7
4.2 方案组成及工作原理 7
5. 机械本体技术方案分析 9
5.1 驱动方式的选择 9
5.2 钻头的设计选型 9
5.3 气动转向机构 10
6气动冲击结构的设计 14
6.1 气动冲击机构的汽缸设计与计算 14
6.2 气动冲击结构的工作原理 15
6.3冲击机构的运动分析 15
7 道路地下打孔机器人气压传动系统设计 18
8道路地下打孔机器人检测与控制方案 20
9总结 22
10 致谢 23
11 参考文献 24