
工业机械手液压系统设计(含CAD原理图装配图)
无需注册登录,支付后按照提示操作即可获取该资料.
工业机械手液压系统设计(含CAD原理图装配图)(任务书,论文说明书16800字,CAD图3张,答辩PPT)
摘 要
工业机械手是现代机械化的一种新型生产方式,同时也是智能自动化研发出来的新型设备。现今随着科学技术的迅猛发展,机械手的原理及应用技术越来越受到重视,在当代工业工厂的生产制造中,工业机器人已经全面应用于车间的自动化流水线,因而,人们开始日趋迫切的对机器人进行研究改造。其中,液压机械手用途最为广泛,所以本次对机械手的液压系统进行设计。
在液压驱动机构中,所述机械手的手臂伸缩和升降均采用了双作用活塞液压缸并由导向杆导向,以确保机械手的运动精度,手腕的旋转采用摆动式液压缸(回转油缸),机械手的手臂旋转和手爪夹持被采用齿条活塞式液压缸。
本课题通过对机械手和液压传动原理的应用技术设计,对工业机械手的液压系统的分类,结构,特性,受力等方面进行分析,并分析液压系统的工作原理。具有液压系统结构的机械手机器人可以在空间中灵活抓取移动物体,并且操作自由度很高,可以在高温和危险的位置作业,从而减少人力,并大大促进生产节奏。
关键字: 机械手;液压系统;自由度




目录
1 绪论 1
1.1 选题背景及其意义 1
1.2 国内外研究现状与发展趋势 1
1.2.1国内的研究现状 1
1.2.2国外研究现状 2
1.3液压技术的现状及发展趋势 2
2机械手液压系统概述和计算 3
2.1 手臂伸缩液压缸的设计计算 3
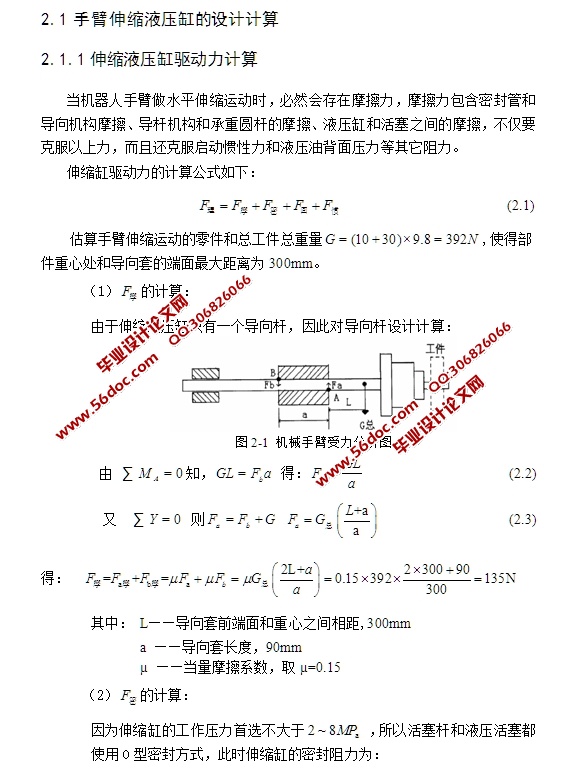
2.1.1伸缩液压缸驱动力计算 3
2.1.2伸缩液压缸的结构尺寸确定 4
2.2手臂垂直升降液压缸的设计计算 7
2.2.1 垂直升降液压缸驱动力的计算 7
2.2.2升降液压缸的结构尺寸的确定 8
2.3手臂回转齿条活塞液压缸的设计计算 9
2.3.1齿条活塞液压缸驱动力的计算 9
2.3.2齿条活塞液压缸结构尺寸的确定 10
2.4手腕回转液压缸的设计计算 10
2.5手爪夹合液压缸的设计计算 11
3工业机械手液压系统的工作原理 13
3.1液压原理简图 13
3.2确定液压系统的工作要求 14
3.3拟定液压系统原理图 15
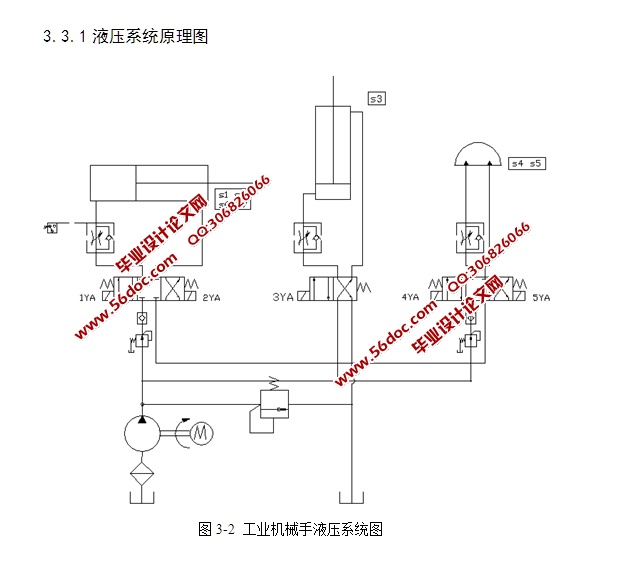
3.3.1液压系统原理图 15
3.3.2电磁铁工作状态表 15
3.3.3液压系统工作原理 16
3.3.4液压系统特点分析: 19
3.3.5电气控制系统原理图 20
3.3.6电气控制系统工作原理 21
3.3.7电气系统特点分析: 23
4液压系统的设计 24
4.1设计方案 24
4.1.1 液压回路的选择 24
4.2系统工作压力的选择 25
4.3 液压元件的选择 25
4.3.1 液压泵的选择 25
4.3.2 液压泵所需液压马达的确定 26
4.3.3 液压阀的选择 27
4.3.4 液压辅助元件的选择原则 28
4.3.5 管道尺寸的确定 28
4.3.6 油箱容量的确定 29
5 总结 31
致 谢 32
参考文献 33