
�����ɶȻ�е�ֽṹ���(��CAD���װ��ͼ)
����ע���¼,֧��������ʾ�������ɻ�ȡ������.
�����ɶȻ�е�ֽṹ���(��CAD���װ��ͼ)(������,��������,���˵����11600��,CADͼֽ4��)
ժҪ
�����ִ���е��ҵ�ķ�չ���ڻ�е�����л�е�˵õ��˸��㷺��Ӧ�á�����Ӧ����Ϊ�㷺�Ļ�е����һ�����Ըı����Ķ�ܲ�����������������տ�ʼ���Ƶ�������ɶ�����ҵ���˶��������Ͳ��ϡ����������ר���豸��Ȼ���ڻ�е�˵��е���Ҫ�������Ǵ������Ϥ�Ļ�е�֡�
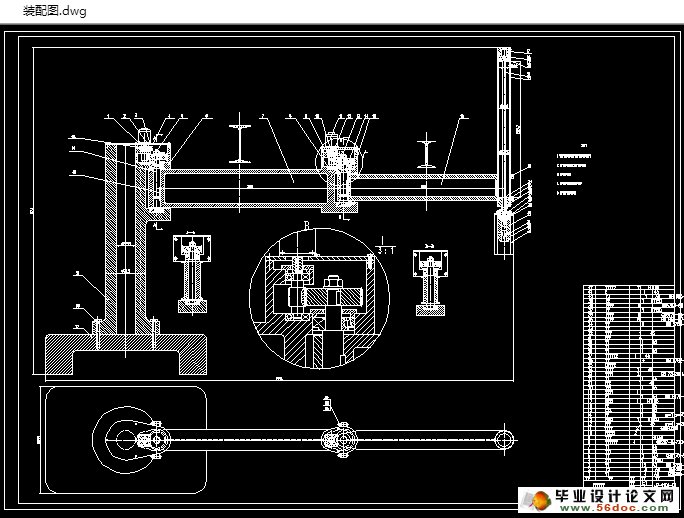
������Ҫ���ܻ�е�ֽṹ��ƣ���Ҫ��Һѹϵͳ��֧���ֱ��˶���Һѹ�ס�ʹ�ֱۿ�����180°��Χ�ڵĻ�ת������ơ���Ҫ����Ϊ��ץȡ�������Ϊ50N�����гֶ���ֱ��Ϊ120�L.��Ҫ���ڼг�ֱ����80��120�L�Ķ�������
���λ�е�ֵ���ƣ���Ϊ�߲��ֽ��н��ܣ�������ͼӽ��ṹ����ƣ��Ǹ����ֲ�����ת�Ƕȣ����аڶ�����ơ��ƻ�е�ֱ�����������ƣ����ֻ�����Ҫ�ɻ����ˡ����塢�м���塢��ѹ������������ѹ������϶��ɡ��Ƕ�λ��ѡ������ƣ���Ҫ������λ��е�ֵ�λ�á����м������������ƣ�ͨ���������е�ֱۻ�ת���ȹ����ӣ�����ת�Ŀ������ȹ��ڻ�е�ֱ������������м����ϣ��Ӷ�ʹ��е�ֱ��˶����Ტ�Ҷ�λȷ�����������Ҫ������������ơ�
�ؼ���: �г�ʽ��е��; Һѹϵͳ; ����ԭ��; ����; ��λ
Abstract
This text mainly introduces the machine hand structure design, main to the liquids press system, support the liquids of the arm sport’s press an urn and make the turn-over urn that the arm revolve in 180°scopes carry on a design .Its main parameter is:The biggest work radius is a 120mm, biggest grab at the weight as5�K. Mainly used for the work piece handling, loading and unloading��can be applied to most of the plant operations, cutting device.
The manipulator design, divided into six parts description���� wrist structure design is based on grasping part of the rotation angle, swing-cylinder design. �� arm structure of the design, telescopic arm to the main structure, internal hydraulic cylinder sleeve driven sets of telescopic arm to achieve the operation. ��arm cylinder design, which is based on the entire arm and the weight of the hand, arm rotational angle of the design to achieve the required operating range. �� arm structure design, the arm is the support arm component must be carefully considered the arm of materials, so that they will reach the strength. �� final link is a major component of the design, arm and boom, boom and hydraulic cylinder blocks, as well as the size the arm are connected by hinged.
Keywords ��to clip machinery hand, Press sulfide hydraulic, work axiom, flexibility, fixed position
ԭʼ����
����������10kg
�ظ���λ���ȣ�±1mm
���ɶȣ�3��Z����ƶ���R���ƽ����θ���ת����
Z����۵�����
R����۵�����
�����
��������˶��ٶȣ�
Z�����£�200mm/s
θ���ת��30°/s
R��������200mm/s
��������˶���Χ��
Z�����£�550mm
θ���ת��90°
R��������400mm
����е��ϵͳ���ɻ��壬���ͻ���������Դ�Ϳ���װ���IJ�����ɡ������������Ͳ������籾��;���ͻ�����Ҫ�������ۺͰ��ջ���;��Դ����Һѹ�����ͻ�е����;����װ����Ҫ���Զ����ƺ��ֶ�������������ɡ�

Ŀ ¼
��һ���� �� 1
1.1 ��е�ֵķ��� 1
1.2 ��е�ֵ���� 4
1.3 Ӧ�û�е�ֵ����� 6
�ڶ������弼��������ϵͳ��� 8
2.1 ԭʼ���� 8
2.2 ����Ҫ�� 8
2.3 ϵͳ��� 9
2.4 ���弼������ 9
2.4.1 �������� 10
2.4.2 �ֲ� 10
�����»�תװ�õ�������ɼ��ṹ��� 12
3.1 ��תװ�õ���� 12
3.1.1 ִ�м� 12
3.1.2 ���ݼ� 12
3.1.3 ������ 12
�����»�е������������������ 14
4.1 С������Ҫ��ɲ��� 14
4.2 ͬ����������ʽ��ȱ�� 14
4.3 ��������Դ 15
4.4 ��е������������Ƽ��� 15
4.4.1 �������ȷ�� 16
4.4.2 ͬ�����ṹ����Ƽ��� 17
��л 22
����� 23