
山茶采摘平台设计研究(含程序,原理图,cad零件图和装配图)
无需注册登录,支付后按照提示操作即可获取该资料.
山茶采摘平台设计研究(含程序,原理图,cad零件图和装配图)(含选题审批表,任务书,开题报告,中期检查表,论文说明书17000字,CAD图纸6张)
摘 要:随着国内外采摘机器人的兴起,21世纪是农业机械化向智能化方向发展的重要历史时期,机械作业已逐步进入农业生产领域。本文研究设计了能减轻人工劳动 强度和提高工作效率的山茶采摘平台,平台由主控模块、行走模块(全向履带)和升降模块组成。系统以STM32为核心控制器,通过对伺服电机的控制可实现采 摘平台的行走控制和升降控制。本文结合由铝型材制作的采摘平台的实物模型对系统的设计进行了分析和总结。
关键词:机器人;农业机械化;采摘平台;全向履带
Design and research of the camellia picking platform
Abstract: With the rise of the picking robot at home and abroad, the 21st century is an important historical period of the mechanization of agriculture to the intelligent direction, the robot has gradually entered the field of agricultural production. This study design can reduce labor intensity and improve the efficiency of the camellia picking platform, This picking platform by walking module(Omni-track), lifting module and main control module. The system use the STM32 as the core controller. The control of servomotor can be achieved walking and lifting of the picking platform. The design of the physical model produced by the aluminum picking platform system was analyzed and summarized in this paper.
Key words: Robot; mechanization of agriculture; picking platform; Omni-track
山茶采摘平台设计方案
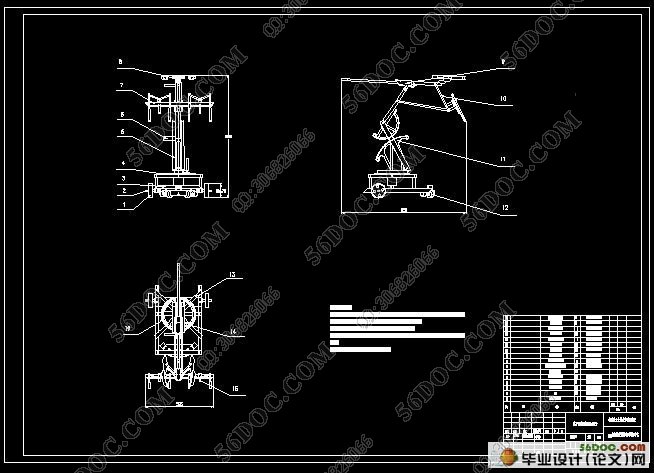
对于智能可升降式移动平台来说,其主要性能是平台运行过程中的稳定性、准确性、安全性以及可操作性。通过学习和总结以往的各种产品,拟定了采摘平台的设计方案如下:
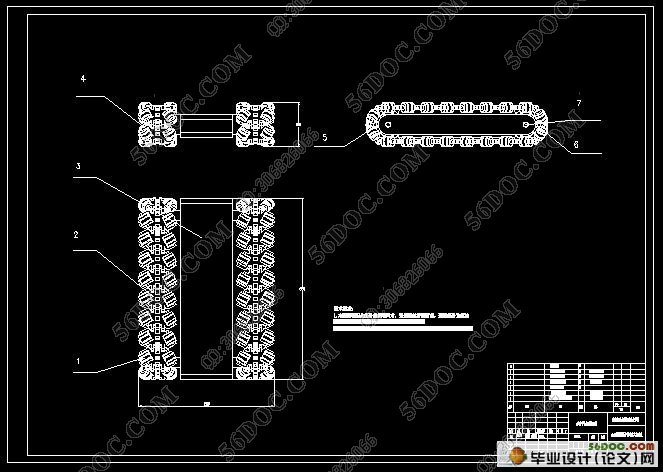
1、移动底盘采用自主研究设计的山地行走系统用全向履带,使采摘平台适用于山区地形,而且在坡地行走的转向过程中无需调整履带的朝向,降低了操作的复杂度,提高了行走的稳定性。
2、升降机构采用行星齿轮啮合折叠式升降结构,其具有升降平稳准确、运输状态尺寸小、安全可靠等优点,结构紧凑使其生产作业轻松自如。
3、控制系统主控芯片采用STM32系列,其芯片高性能、低成本、低功耗的嵌入式应用等特点,在复杂的作业中更稳定和实用以及方便工业方面的改装。
2.3 研制概要
课题要求设计山茶采摘平台,目的是减轻人工的劳动强度,提高工作效率。系统主要包含以下内容:
1. 采摘平台的底盘结构设计:要求结合山茶生长区的地域特点,设计适合于该地形行走的底盘结构,并且具有较强的负载能力。
2. 采摘平台的升降结构设计:要求结合山茶树的外形尺寸特征,设计具有一定行程的升降系统,实现采摘平台的上升与下降,以达到方便采摘山茶的目的。
3. 采摘平台的电气控制系统设计:结合各单元的机械结构,设计对应的电气控制系统实现对相应动作的控制。
主要内容:
课题要求设计山茶采摘平台,目的是减轻人工的劳动强度,提高工作效率。系统主要包含以下内容:
1.采摘平台的底盘结构设计
要求结合山茶生长区的地域特点,设计适合于该地形行走的底盘结构,并且具有较强的负载能力。
2.采摘平台的升降系统结构设计
要求结合山茶树的外形尺寸特征,设计具有一定行程的升降系统,实现采摘平台的上升与下降,以达到方便采摘山茶的目的。
3.采摘平台的电气控制系统设计
结合各单元的机械结构,设计对应的电气控制系统实现对相应动作的控制。

目 录
摘 要 1
关键词 1
1 前言 1
1.1 研究意义与目的 2
1.2 国内外研究现状 2
2 山茶采摘平台创意设计与方案 6
2.1 机器人一般组成 6
2.2 山茶采摘平台设计方案 6
2.3 研制概要 7
3 采摘平台机械设计 7
3.1 底盘的设计 7
3.1.1 基于45°全向轮的分析 7
3.1.2 一种山地行走系统用全向履带 10
3.2 升降机构的设计 11
4 采摘平台电路硬件电路设计 13
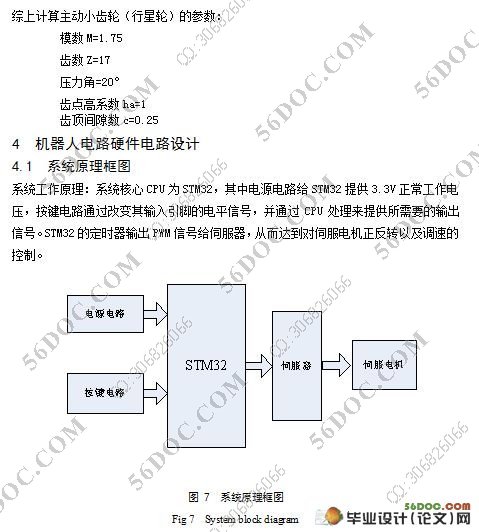
4.1 系统原理框图 13
4.2 采摘主控制板结构及说明 13
4.2.1最小系统 14
4.2.2 主控制板实物图 14
4.3 电源模块 15
4.4 伺服电机驱动电路 16
4.5 按键电路 20
5 主控制板程序设计 21
5.1 系统主程序流程图 21
5.2 PWM的产生 21
5.2.1 软件生成PWM 21
5.2.2 硬件生成PWM 23
6 系统的调试 25
7 总 结 25
参考文献 25
致 谢 26
附录 27
附录
附录1:系统程序
附录2:电路原理图
附录3:系统机械设计装配简图