
激光水平仪系统设计(含机械图,电路图,Proe三维图)☆
无需注册登录,支付后按照提示操作即可获取该资料.
激光水平仪系统设计(含机械图,电路图,Proe三维图)☆(毕业论文36000字,答辩ppt,cad图纸17张,Proe三维造型图)
摘要
水平仪是在桥梁架设、铁路铺设、土木工程、地质勘探、石油钻井、航空航海、工业自动化、智能平台、机械加工等领域不可缺少的重要工具。传统的水平仪虽然也能度量水平度,但是存在一定的局限性,测量精度不高,效率低,性能无法保证;而有些仪器却因为造价过高不利于广泛应用。因此,在兼顾精确性与经济性的前提下,本课题提出了激光水平仪系统的设计。
本课题设计的水平仪系统是以体积小、驱动简单、功耗低、寿命长的半导体激光器作为测量光线输出设备,很大程度地提高了水平仪的精度和降低成本;利用倾角传感器自动测量仪器倾斜度,通过单片机控制电机来校准仪器平衡性,实现了水平仪的自动安平,提高了工作效率。
基于现代自动化、红外发送和接收的发展方向,本课题设计了红外遥控器来远距离控制舵机来实现设备的180°内的旋转,很大程度地提高了产品的自动化性,也带来了一定程度的方便性。
关键词:半导体激光器;水平仪;倾角传感器;单片机;红外遥控
System Design of a Laser Gradienter
ABSTRACT
Gradienter is an indispensable tool, which are widely used in bridges constructing, railway laying, civil engineering, geological exploration, oil drilling, aviation && navigation , industrial automation, intelligence platform, machinery processing, etc. The traditional gradienter can also measure the evelness, but it has certain limitations: measurement accuracy is not high, efficiency is too low and performance can't be guaranteed. In addition, some instruments can not be widely used because of too high cost. Therefore, under the premise of both accuracy and economy, the thesis puts forward to design a laser level system.
The system design of a laser gradienter is based on a semiconductor laser light output device which has the advantages of small size, easy driving, low power consumption, long life and greatly improves the level of precision and reduce the cost. Anping technology is adopted by using tilt sensors to automatic measure the instrument gradient and the single-chip microcomputer to control motor to calibration instrument balance, which realizes the automatic level of anping and improves the work efficiency.
Based on the development direction of automation, infrared sending && receiving, a Infrared remote control is designed to remote control the steering gear to rotate the equipment within 180 ° , which greatly improves the product automation, also brings a certain degree of convenience.
Keywords:Semiconductor laser; Gradienter; Tilt sensors ; Single-chip microcomputer; Infrared remote control.
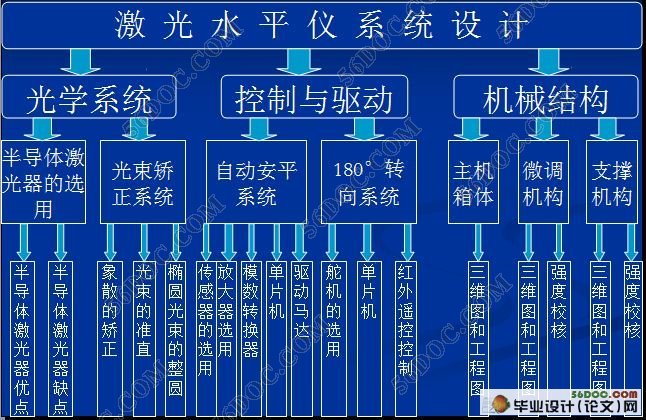
本设计的主要内容
激光水平仪种类很多,都是根据实质生产要求而生产,本课题设计的是半导体激光水平仪是个光机电一体化产品,结构简单,使用方便,精度高。本设计是选用实惠的半导体激光器发出直线光束。经过矫正系统得到各种形状的高质量的光束。仪器自动化性极高,应用2051芯片控制电机来实现系统的自动安平和控制舵机的工作实现主机180°的任意转向。而各种角度值,是通过红外遥控输入。另外,还设计了高度可调、拆装方便的三脚架支撑机构。



#p#副标题#e#
目录
第1章 绪论 1
1.1课题的目的和意义 1
1.2课题研究的背景与意义 1
1.3国内外研究现状 3
1.3.1 国内对水平仪的研究现状 3
1.3.2 国外对水平仪的研究现状 4
1.4本设计的主要内容 4
1.5 本章小结 4
第2章 光学系统的设计 5
2.1激光器的选用 5
2.1.1分析各种激光器大概特性 5
2.1.2半导体激光器工作原理 6
2.2激光光束的矫正系统设计 10
2.2.1象散的校正 10
2.2.2光束的准直 10
2.2.3椭圆光束的整圆 11
2.3 光线转换系统设计 12
2.4 本章小结 13
第3章 自动安平系统的设计 14
3.1传感器选型 14
3.1.1 SCA61T的引脚功能及工作原理 15
3.1.2硬件设计 16
3.1.3软件设计 16
3.2放大器 17
3.2.1 AD603的特点及引脚功能 17
3.2.2 AD603内部结构及原理 19
3.3模数转换器 21
3.3.1引脚分布及功能 21
3.3.2模拟信号输入 22
3.3.3时钟模式和工作时序 23
3.3.4 输出数据格式 23
3.4单片机的选用 24
3.4.1内部结构 25
3.4.2引脚说明 25
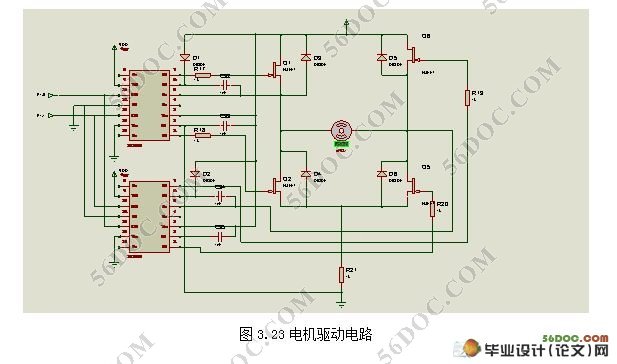
3.5电机的选用与驱动 27
3.5.1 支脚的设计 28
3.5.2 PWM控制 28
3.5.3 驱动电路 34
3.5.4 PWM控制H桥双极性主电路 35
3.5.5 直流电机调速原理 37
3.6 安平系统软件设计 38
3.7 本章小结 41
第4章 自动转向系统的设计 42
4.1舵机的选用 42
4.1.1舵机结构 42
4.1.2 舵机的规格和选型 43
4.1.3 舵机工作原理 44
4.1.4舵机的控制 45
4.2 单片机控制和PWM信号产生 46
4.2.1 单片机选用 46
4.2.2 PWM信号产生 47
4.2.3 PWM信号控制精度制定 48
4.2.4 单片机控制舵机的程序 49
4.3 无线输入设备 50
4.3.1 单片机红外遥控概述 50
4.3.2 二进制信号的编码、调制和解码 50
4.3.3 基于字节传输的红外遥控数据格式 52
4.3.4 单片机红外遥控的硬件电路设计 53
4.3.5 单片机红外遥控的软件设计 53
4.3.6 数字键盘 61
4.4 本章小结 67
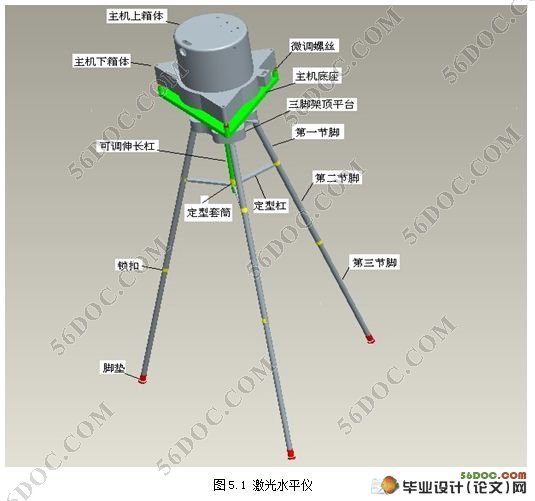
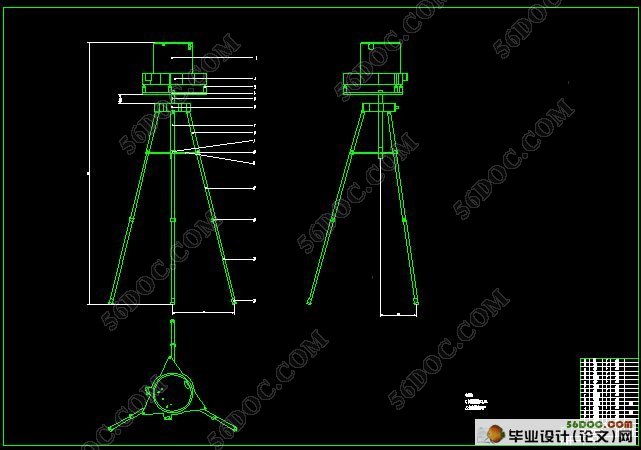
第5章 机械结构的设计 68
5.1主机箱体设计 68
5.2底座结构设计 69
5.2.1主机底座 70
5.2.2 微调底座 70
5.3支撑机构 71
5.3.1 三脚架 71
5.3.2 伸缩杠 73
5.4 强度校核 73
5.4.1 微调支脚强度校核 73
5.4.2 支脚的强度校核 74
5.5 本章小结 75
总结与展望 76
参考文献 77
致 谢 78
参考文献
[1]魏彪.激光原理及应用[M].重庆:重庆大学出版社,2007.
[2]陈海清.现代实用光学系统[M].华中科技大学出版社,2003.
[3]曹俊卿.工程光学基础[M].北京:中国计量出版社,2003.
[4]林宋,刘勇等.光机电一体化技术应用100例[M].北京:机械工业出版社,2005.
[5]林宋,刘杰生等.光机电一体化技术产品实例[M].化学工业出版社,2003.
[6]范宁军,李杰.光机电一体化系统设计[M].北京:机械工业出版社,2009.
[7]卿太全,郭明琼.最新传感器选用手册[M].北京:中国电力出版社,2009.
[8]吕俊芳,钱政.传感器接口与检测仪器电路[M].北京:国防工业出版社,2009.
[9]张俊谟.单片机中级教程[M].北京:北京航天航空大学出版社,2000.
[10]彭军.光电器件基础与应用[M].北京:科学出版社,2009.
[11]陈明荧.8051单片机基础教程[M].科学出版社. 2003.
[12]谭浩强.C++程序设计[M].北京:清华大学出版社,2004.
[13]陆运华,胡翠华.图解电动机控制电路[M].北京:中国电力出版社,2008.
[14]孙立志.PWM与数字化电动机控制技术应用[M].北京.中国电力出版社.2008.
[15]张庆双.电动机控制电路精选[M].北京:机械工业出版社,2009.
[16]张庆双.实用电路速学速用宝典[M].北京:机械工业出版社,2011.
[17]赵丁选.光机电一体化设计使用手册[M].化学工业出版社,2005.
[18]曲娜,程凤琴.基于51单片机的舵机控制信号的设计[DB].吉林:吉林建筑工程学院,2010.
[19]时玮. 利用单片机PWM信号进行舵机控制[C].北京:北京交通大学,2005.
[20]Silvano Donati.Electro-Optical Instrumentation Sensing and Measuring with Lasers[M].Xi’an Jiaotong university press,2006.
[21]徐自立,周小平.工程材料[M].武汉:华中科技大学出版社,2009.
[22]范钦珊.工程力学[M].南京:高等教育出版社,2006.