
智能小车的自动驾驶系统的设计☆
无需注册登录,支付后按照提示操作即可获取该资料.
智能小车的自动驾驶系统的设计☆(21000字)
摘 要
本文介绍的是一种基于微处理器智能汽车控制器的设计。主要介绍智能汽车的运动模型、硬件系统和直流电机控制方法。重点针对智能汽车的调速系统进行建模,利用protel软件对系统的启动、调速和抗扰的特性电路进行设计,同时初步优化控制策略。
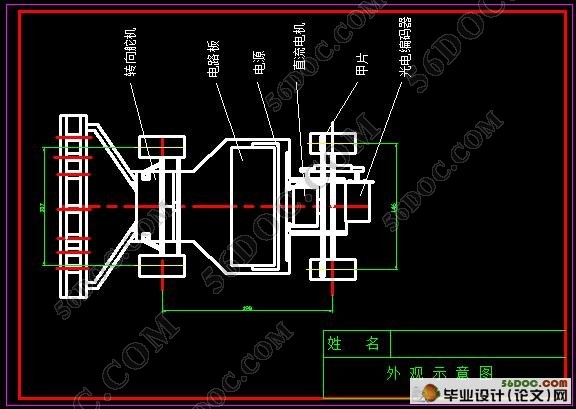
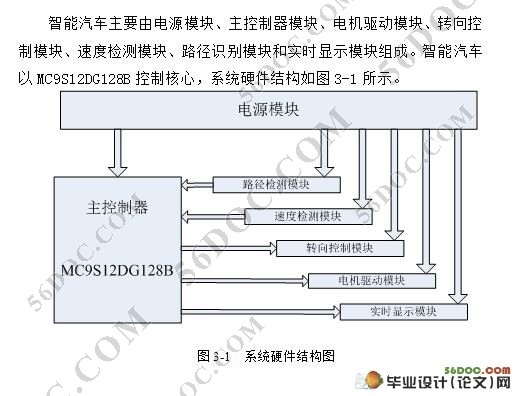
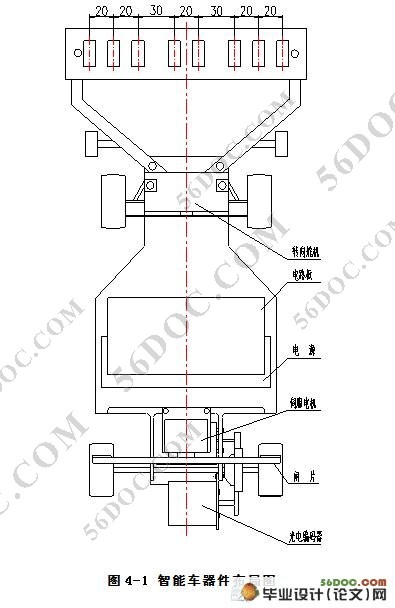
智能汽车的硬件系统主要由电源模块、主控制器模块、电机驱动模块、转向控制模块、速度检测模块、路径识别模块和实时显示模块组成。主控制器模块采用飞思卡尔公司的MC9S12DG128B单片机作为处理核心,用以处理方位信号和速度信号,同时对转向和转速进行实时控制;路径识别模块采用红外传感器收集路径信息,并分析红外传感器分布对路径识别的影响;驱动模块采用MC33886驱动芯片,通过控制PWM占空比实现对直流电机的控制;速度检测模块使用霍尔传感器获得智能车信息,并以此形成速度的闭环控制;实时显示模块用于当前小车相关信息的显示。
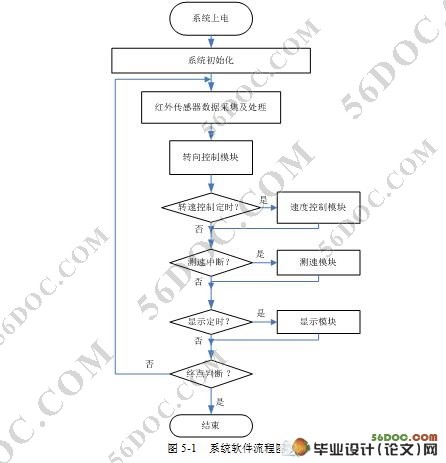
智能汽车的软件系统包括以下几个模块:红外传感器信息采集及处理模块、速度检测模块、转向控制模块、转速控制模块和实时显示模块。根据仿真结果,分析转速控制方法对智能汽车调速性能的影响,转向控制中分析PD控制对智能汽车的转向控制的影响。
该智能汽车控制系统具有硬件电路结构简单,系统稳定性强、响应性快,控制效果好的特点。
关键词:智能汽车;红外传感器;PID控制;自动循迹;
ABSTRACT
This article describes an intelligent vehicle controller design based on Freescale microprocessor. Introduces the smart car’s hardware system,sports model and the DC motor control method. Focusing on the smart car to the speed control system modeling,use of Protel simulation software on the system start-up,speed control and anti-interference characteristics to simulate,at the same time optimize the initial control strategy.
The hardware system of intelligent car is mainly including power supply module,the main controller module,motor driver modul,steering control module,speed detection module,the path identification module and real-time display module. Main controller module using Freescale’s single-chip microcomputer of the core MC9S12DG128B,for the processing of the signal diretion and speed signals,and real-time controling steering and speed; path identification module uses infrared sensors to gather path information and analyze the impact of the paths in different distributions of infrared sensors; motor driver module is driven by MC33886,and control the PWM duty cycle to achieve the control of DC motor; speed detection module uses Hall sensors to obtain information on the intelligent car,and to form the closed-loop speed control; real-time display module is used for the current vehicle information display.
Intelligent car of the software system includes the following modules:infrared sensor data acquisition and processing module,the speed of detection module, steering control module,speed control module and real-time display module. According to simulation results,analysis of the intelligent speed control performance of vehicle speed. Analysis of steering control in the PD control of the steering control intelligent car impact.
Experiments show that the intelligent vehicle control system has a simple hardware circuit, the system stability,fast response,good control features.
Keywords: Intelligent car;Infrared sensor;PID control;Aototrack;

#p#副标题#e#
目 录
摘 要 II
ABSTRACT III
目 录 I
第1章 绪论 1
1.1 引言 1
1.2 移动机器人简介及发展趋势 1
1.3 应用前景 3
第2章 智能汽车原理 5
2.1 智能汽车结构 5
2.2 线性二自由度汽车模型 6
第3章 硬件系统设计 10
3.1 硬件系统总体结构 10
3.2 电源管理模块 10
3.2.1 单片机及外围电路电源 11
3.2.2 舵机电源 11
3.3 转向控制模块 12
3.4 主控制器模块 12
3.5 电机驱动模块 14
3.5.1 MC33886简介 14
3.5.2 电机驱动电路 15
3.6 速度检测模块 16
3.7拨码开关电路 17
3.8 路径识别模块 18
3.8.1 红外传感器识别电路 18
3.9 实时显示模块 20
第4章 机械部分 22
4.1 智能车前轮定位的调整 24
4.1.1 主销后倾角 24
4.1.2 主销内倾角 25
4.1.3 车轮外倾角 25
4.1.4 前轮前束 26
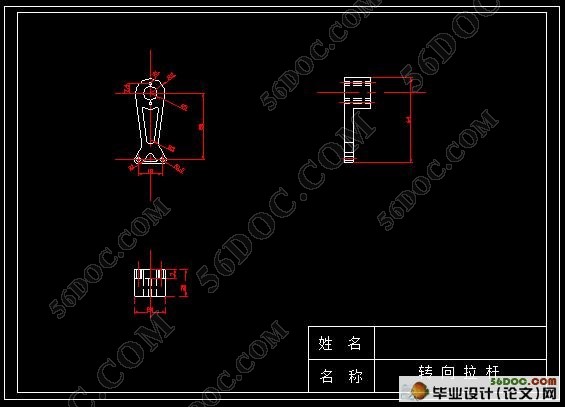
4.2 智能车转向机构调整优化 26
4.3 智能车后轮减速齿轮机构调整 28
4.4 其它机械结构的调整 29
第5章 直流电机调速系统 30
5.1 直流电机数学模型 30
5.2 PID控制原理 32
第6章 软件系统设计 34
6.1 软件系统流程 34
6.2 系统初始化模块 35
6.3 红外传感器数据采集及处理模块 38
6.4 转向控制模块 42
6.5 转速控制模块 43
6.6 测速模块 44
6.7 起始线判断 44
第7章 结论与展望 47
7.1 结论 47
7.2 不足之处及未来展望 47
参考文献 48
致 谢 50
附录A:常用符号 51
附录B:中断向量表 52
附录 C:程序 55
翻译部分: 69
中文翻译: 76