
工业机械手及控制设计(机械手设计)
无需注册登录,支付后按照提示操作即可获取该资料.
工业机械手(以下简称机械手)是近代自动控制领域中出现的一项新技术,并且成为现代机械制造生产系统中的一个重要组成部分。这种新技术发展很快逐渐形成一门新兴的学科――机械手工程。
机械手的组成
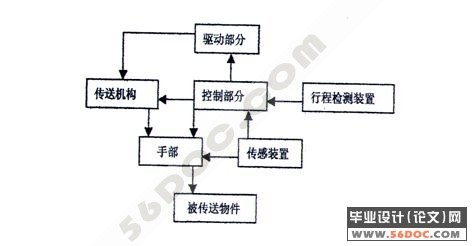
机械手主要由执行机构、驱动机构和控制系统三大部分组成。
驱动机构
(1) 驱动机构主要有四种:液压驱动、气压驱动、电气驱动和机械驱动。其中以液压气动用的最多,占90%以上,电动、机械驱动用的较少。
液压驱动主要是通过油缸、阀、油泵和油箱等实现传动。它利用油缸、马达加上齿轮、齿条实现直线运动;利用摆动油缸、马达与减速器、油缸与齿条、齿轮或链条、链轮等实现回转运动。液压驱动的优点是压力高、体积小、出力大、运动平缓,可无级变速,自锁方便,并能在中间位置停止。缺点是需要配备压力源,系统复杂成本较高。
控制系统
机械手控制系统的要素,包括工作顺序、到达位置、动作时间和加速度等。
控制系统可根据动作的要求,设计采用数字顺序控制。它首先要编制程序加以存储,然后再根据规定的程序,控制机械手进行工作。
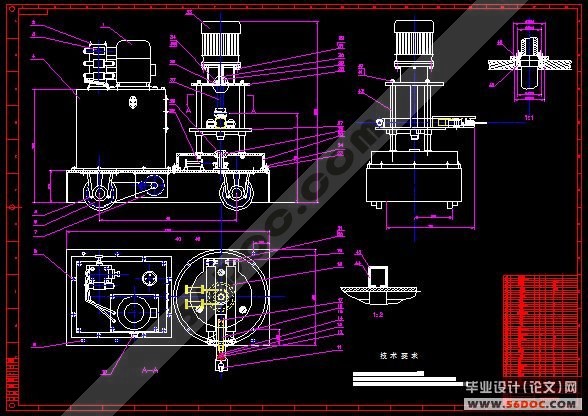
系统组成
本机械手系统由机体,传送机构,动力源和控制装置四部分组成。其中机体由小车及本体等部分组成;传送机构主要由伸缩臂及抓紧机构所组成;动力源由液压驱动和机械驱动两种形式构成控制装置主要由自动控制和手动控制两部分组成。
目 录 13000字
序 言……………………………………………………………3
一、 概述……………………………………………………….5
1-1 机械手的分类 ……………………………….……6
1-2 机械手的组成……………………………….……11
1-3 机械手的意义………………………………….…15
二、 总体技术方案及系统组成………………………………16
2-1 系统组成…………………………………….……16
2-2 总体技术方案……………………………….……17
三、 机械手液压部分…………………………………..……20
3-1 液压部分设计……………………….……………20
3-2 液压缸主要尺寸确定…………………….………24
3-3 部件设计………………………………….………26
四、 回转装置的总体组成及结构设计 …………….………27
4-1 回转装置组成………………………………….…27
4-2 结构设计…………………………………….……29
五、 行走装置的组成及结构设计……………………..……34
5-1 行走装置组成……………………………….……34
六、 零部件编程……………………………………….….…38
6-1 数控车床加工程序编制基础
6-2 程序编制
七、 设计体会…………………………………………..……40
八、 参考文献…………………………………………..……42