
单摄像头SLAM技术研究
无需注册登录,支付后按照提示操作即可获取该资料.
单摄像头SLAM技术研究(任务书,开题报告,论文14000字)
摘要
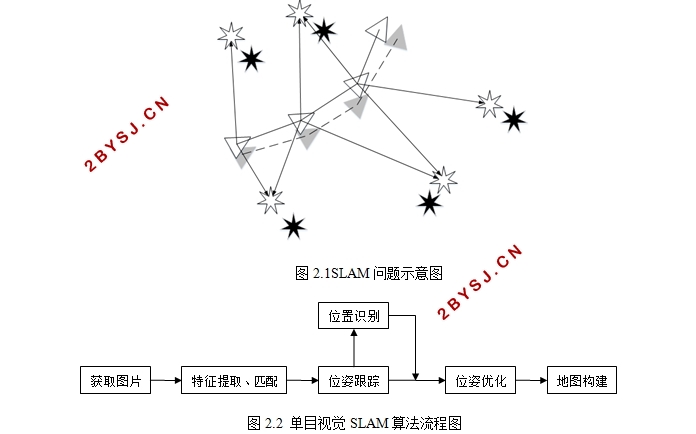
移动机器人同步定位与地图构建(Simultaneous Localization and Mapping,以下简称SLAM)是当下的机器人研究中最受关注的问题之一,在机器人由理论研究向实际应用发展的道路上有非常重要的意义。SLAM的问题可以被描述为:机器人出发的起点未知,中途经过的环境也未知,只能在运动过程中根据自身传感器接收到的周围环境信息及摄像机位姿等估计运动轨迹和创建增量式地图,同时利用该地图不断更新自己的位置和路径,以达到定位的功能。
本文基于单摄像头设计并实现了一个视觉SLAM系统,针对传统SLAM方法存在的问题,如提取效率偏低,实时性较差等进行了一定的改进。首先通过SLAM方案的优缺点及实施可行度的对比,选择 PTAM技术构建SLAM平台;其后,针对原系统采用FAST算子进行特征点检测时,不具有方向性的缺点,以及没有进行重复场景回环的缺陷,采用亮度质心技术及闭环检测的方法加以优化。
实验结果表明,该方案确实能在一定程度上提高算法的效率,证明了本文SLAM优化方法的有效性。
关键词:同步定位与地图构建 单目视觉 特征检测PTAM关键帧
Abstract
Mobile robot Simultaneous Localization and Mapping (hereinafter referred to as SLAM) is one of the most concerned issues in current robotics research. It has a very important significance in the development of robots from theoretical research to practical application. The problem of SLAM can be described as: the starting point of the robot's departure is unknown, and the environment passing through the middle is unknown. It is only possible to estimate the motion trajectory and create an incremental map based on the surrounding environment information received by the sensor and the pose of the camera during the movement. , while using the map to constantly update their location and path to achieve the positioning function.
In this paper, a visual SLAM system is designed and implemented based on a single camera. The problems existing in traditional SLAM methods such as low extraction efficiency and poor real-time performance have been improved. Firstly, through the comparison of the advantages and disadvantages of the SLAM scheme and the feasibility of implementation, the SLAM platform was selected based on the PTAM technology. Then, when using the FAST operator to perform feature point detection in the original system, it had no directionality and did not perform looPBack. The defects are optimized using the luminance center of mass technique and the closed-loop detection method.
Experimental results show that the scheme can indeed improve the efficiency of the algorithm to a certain extent, and proves the effectiveness of the SLAM optimization method in this paper.
Keywords: simultaneous localization and map building, monocular vision,Feature detection,PTAM key frame
目录
第1章绪论 1
1.1 研究背景、目的与意义 1
1.2 国内外研究状况概述 2
1.2.1 国内研究概况 2
1.2.2 国外研究概况 2
1.3 本文内容与架构安排 3
1.3.1 主要研究内容 3
1.3.2 架构安排 3
第2章基于单目视觉SLAM的基本原理及方法 5
2.1 单目视觉SLAM问题概述 5
2.2 单目视觉SLAM方法的发展 6
2.2.1 基于特征的SLAM方法 6
2.2.2 直接的SLAM方法 9
2.2.3各种算法的比较与选择 10
2.3 本章小结 10
第3章PTAM关键帧算法及其实现 11
3.1 PTAM特征算法原理简介 11
3.2 追踪线程 11
3.2.1FAST特征提取 12
3.2.2 地图初始化与跟踪定位 12
3.2.3关键帧的选择 13
3.3 绘制线程 14
3.4主要缺陷及其改良 14
3.4.1 旋转不变性改良 15
3.4.2 闭环检测改良 15
3.5本章小结 16
第4章系统调试与功能展示 17
4.1 软件平台简介 17
4.2 环境配置与调试 17
4.3 摄像机的标定 22
4.4系统功能介绍与展示 24
4.5本章小结 25
第5章结论与展望 26
参考文献 27
致谢 28