
机器人轨迹跟踪控制方法研究(含MATLAB程序)
无需注册登录,支付后按照提示操作即可获取该资料.
机器人轨迹跟踪控制方法研究(含MATLAB程序)(课题申报表,任务书,开题报告,中期检查表,外文翻译,论文15300字,程序,答辩PPT)
摘 要
机器人是一类复杂的、具有不确定性的、多输入多输出非线性时变系统。滑模变结构控制对系统参数和外部扰动等不确定性具有不变性,因此非常适合于机器人的控制。本文主要研究了机器人的滑模轨迹跟踪控制。
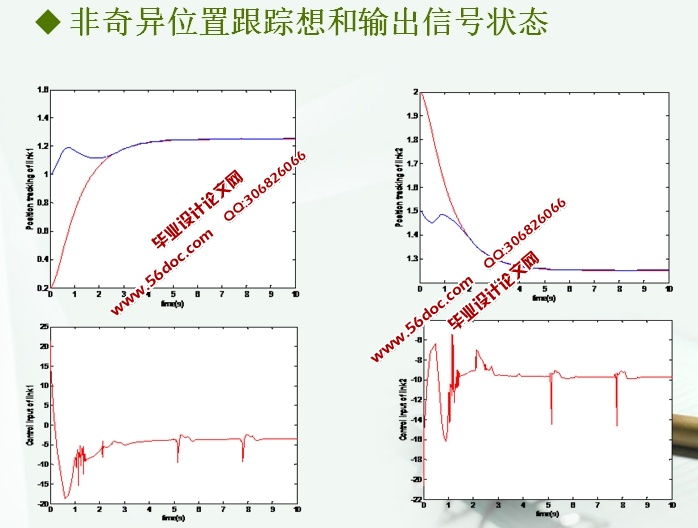
首先简要介绍机器人轨迹跟踪方法和滑模控制的基本原理,然后着重阐述奇异终端滑模控制和非奇异终端滑模控制原理。针对奇异终端滑模控制律的奇异现象,提出非奇异终端滑模轨迹跟踪控制方案。并且设计非奇异终端滑模律,基于MATLAB和SIMULINK进行仿真研究。仿真结果表明该控制不但有效的避开了奇异现象,而且实现了机器人的快速轨迹跟踪控制。可见本文的控制方案能够保证机器人系统轨迹跟踪控制的快速性和鲁棒性,是可行且有效的。
关键词:非奇异终端滑模控制;机器人;轨迹跟踪
ABSTRACT
The robot is a class of complexity, uncertainty, multi-input multi-output nonlinear time-varying systems. The sliding mode variable structure control system parameters and external disturbance uncertainty invariance, so it is suitable for the control of the robots.This paper studies the robotic arm of the non-singular terminal sliding mode control for trajectory tracking control.
First we use a brief introduction to the basic principles of the robot trajectory tracking method and sliding mode control, and then focuses on the singular terminal sliding mode control and non-singular terminal sliding mode control principle.For the strange phenomenon of the singular terminal sliding mode control law, the non-singular terminal sliding mode tracking control scheme.And design of non-singular terminal sliding mode law, based on MATLAB and SIMULINK simulation study.the simulation results show that the control is not only effective to avoid a singular phenomenon, but also rapid to achieve the robot trajectory tracking control.It is seen that the control program is feasible and effective to ensure quick and robustness of the trajectory tracking control of robot systems.
Keywords: Non-singular terminal sliding mode control; robot; trajectory tracking
本文主要内容
第1章介绍机器人和滑模变结构的理论概述。第2章主要介绍的是一些基础理论,包括终端滑模控制和非奇异终端滑模控制理论。第3章给出机器臂的动力学模型,分别对机器臂进行奇异终端和非奇异终端滑模控制,巧妙的设计滑模面。第4章进行仿真实验,针对奇异终端滑模和非奇异终端滑模的仿真结果进行比较,得出结论。
目 录
第1章 概述 1
1.1机器人研究概述 1
1.2 滑模变结构控制 1
1.3本文主要内容 9
第2章 基础理论 10
2.1终端滑模变结构控制 10
2.3 MATLAB基础知识 12
2.4 SIMULINK基础知识 14
2.5 本章小结 14
第3章 机器人的非奇异终端滑模控制 15
3.1机器人的动力学模型 15
3.2机器人奇异终端滑模控制 15
3.3机器人非奇异终端滑模控制 17
3.4本章小结 19
第4章 仿真研究 21
4.1仿真模型 21
4.2机器人奇异终端滑模控制仿真 22
4.3机器人非奇异终端滑模控制仿真 25
4.4本章小结 27
结 论 28
参考文献 29
致 谢 30
附 录 31